相机映射3D
功能介绍
模块位置:定位-相机映射3D
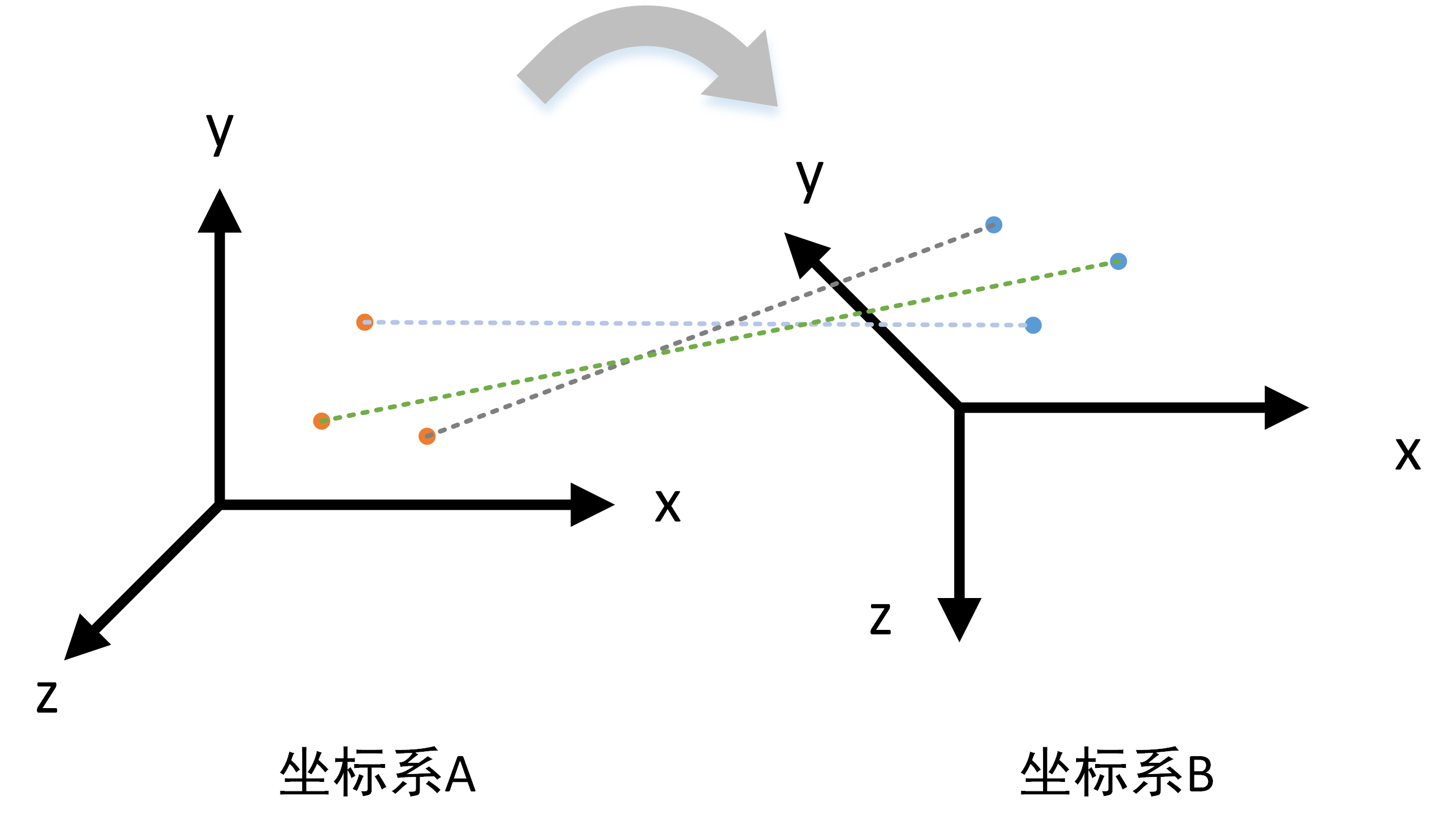
相机映射3D模块根据两个坐标系中对应的3D点,一一映射,点对数量必须大于等于3,输出一个变换矩阵。 通过点对映射,获取坐标系A变换到坐标系B的变换矩阵。
输入点方法:
• 手动:逐个添加3D点形成点集。
• 继承:直接使用其他模块输出的3D点集。
使用场景
常用于不同3D坐标系之间的变换关系计算。
输入
| 输入 | 类型 | 说明 |
|---|---|---|
| 输入点方法 | 枚举 | 手动或继承 |
| 是否指定坐标点序号 | 布尔 | 只有输入点方法为继承时生效 |
| 源坐标系3D点列表 | 3D点集 | 第一个相机输入3D点集 |
| 目标坐标系3D点列表 | 3D点集 | 第二个相机输入3D点集 |
| 源坐标系序号列表 | 整数列表 | 只有输入点方法为继承且开启指定坐标点序号生效 |
| 目标坐标系序号列表 | 整数列表 | 只有输入点方法为继承且开启指定坐标点序号生效 |
参数说明
1.方法
坐标转换算法选择:
- 罗德里格斯变换(Rodrigues)
基于旋转向量的三维坐标转换方法,计算效率较高
- 刚体变换(Rigid Transformation)
保持物体形状不变的欧氏空间变换(包含旋转和平移),具有更好的数值稳定性(推荐使用)
输出
| 输出 | 类型 | 默认启用 | 额外启用条件 | 说明 |
|---|---|---|---|---|
| 变换矩阵 | 矩阵 | 是 | / | / |
| 平移向量 | 实数列表 | 是 | / | / |
| 旋转矩阵第1列 | 实数列表 | 是 | / | / |
| 旋转矩阵第2列 | 实数列表 | 是 | / | / |
| 旋转矩阵第3列 | 实数列表 | 是 | / | / |