Blob2D
功能介绍
模块位置:定位-Blob2D
该模块用于检测二维图像中的斑点。 斑点是指二维图像中和周围颜色有颜色差异和灰度差异的区域,因为斑点代表的是一个区域,所以其相对于单纯的角点,具有更好的稳定性和更好的抗干扰能力.
使用场景
常用于在2D图像中定位和分割物体。
输入
| 输入 | 类型 | 说明 |
|---|---|---|
| 图像源 | 图像 | 输入方式是选择输出图像的模块。 |
参数说明
1. 阈值范围
用于图像二值化的灰度值范围。只有灰度值在此范围内的像素才会被考虑为前景,参与斑点的形成。
2. 查找数量
设置需要从图像中查找的Blob数量的最大值。
3. 查找黑色斑点
默认查找比背景亮的白色斑点。勾选此项后,将查找比背景暗的黑色斑点。
4. 二值化图像输出
是否输出二值化后的图像,方便调参。
5. 排序类型 & 排序特征
排序类型:选择排序顺序(如:从大到小、从小到大)。
排序特征:选择用于排序的特征依据(如:面积、周长、圆形度等)。模块将根据此特征对找到的所有斑点进行排序,并最终输出前“查找数量”个斑点。
过滤参数
以下选项用于启用对斑点特定几何特征的计算和过滤。启用后,通常可以配合相应的“范围”参数来过滤不符合要求的斑点。
1. 面积使能
启用后,计算并允许通过斑点的面积进行过滤。
2. 角度使能
启用后,计算并允许通过斑点的最小外接矩形角度进行过滤。该角度描述了斑点的朝向。
3. 周长使能
启用后,计算并允许通过斑点的周长进行过滤。周长的计算基于斑点的像素边界。
4. 短轴使能
启用后,计算并允许通过斑点最小外接矩形的短边长度进行过滤。
6. 长轴使能
启用后,计算并允许通过斑点最小外接矩形的长边长度进行过滤。
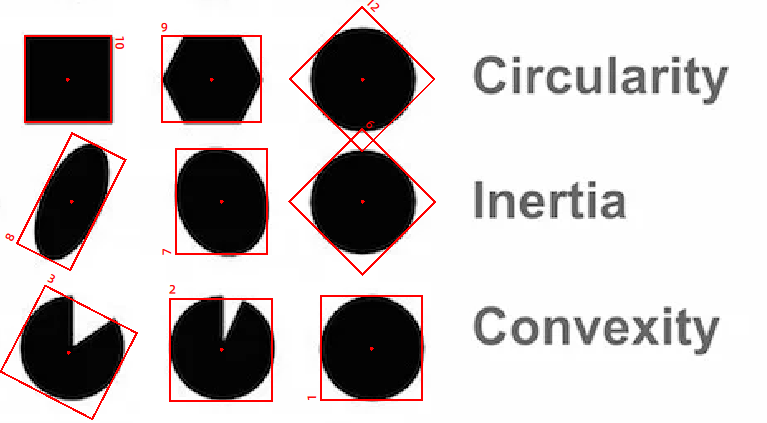
6. 圆形度使能
启用后,计算并允许通过斑点的圆形度进行过滤。
圆形度是描述斑点接近圆形程度的指标,计算公式为:圆形度 = (4 * PI * 面积) / (周长 ^ 2)�。理想圆形的值为1,值越小表示形状越不规则。
7. 矩形度使能
启用后,计算并允许通过斑点的矩形度进行过滤。
矩形度是描述斑点接近矩形程度的指标,计算公式为:矩形度 = 斑点的实际面积 / 最小外接矩形面积。理想矩形的值为1,值越小表示形状填充其外接矩形的程度越低。
输出
| 输出 | 类型 | 默认启用 | 额外启用条件 | 说明 |
|---|---|---|---|---|
| 质心X | 实数列表 | 是 | / | / |
| 质心Y | 实数列表 | 是 | / | / |
| 面积 | 实数列表 | 是 | / | / |
| 角度 | 实数列表 | 是 | / | / |
| 周长 | 实数列表 | 是 | / | / |
| 长轴 | 实数列表 | 是 | / | / |
| 短轴 | 实数列表 | 是 | / | / |
| 圆形度 | 实数列表 | 是 | / | / |
| 矩形度 | 实数列表 | 是 | / | / |
| 区域列表 | 区域集 | 是 | / | / |
| 质心点 | 2D点集 | 是 | / | / |
| 二值化图像 | 图像 | 否 | / | / |