相机映射3D
功能介绍
相机映射3D模块通过两个相机的对应3D点对,点对数量必须大于等于3,标定出对象点所在坐标系到目标点所在坐标系的转换关系,输出一个坐标系。
模块位置:定位-相机映射3D
使用说明
参数说明
- 图像源:输入图像
- 方法:Rodrigues,刚体变换
- 输入原坐标系点:原始3D点集
- 输入目标坐标系点:目标3D点集
案例流程
此案例是用两个相机分别拍摄标定块的正面和反面,分别计算出正面和反面的点若干,即可算出两个相机的坐标系转换关系。

- 获取源数据,可以选择相机或者加载本地数据
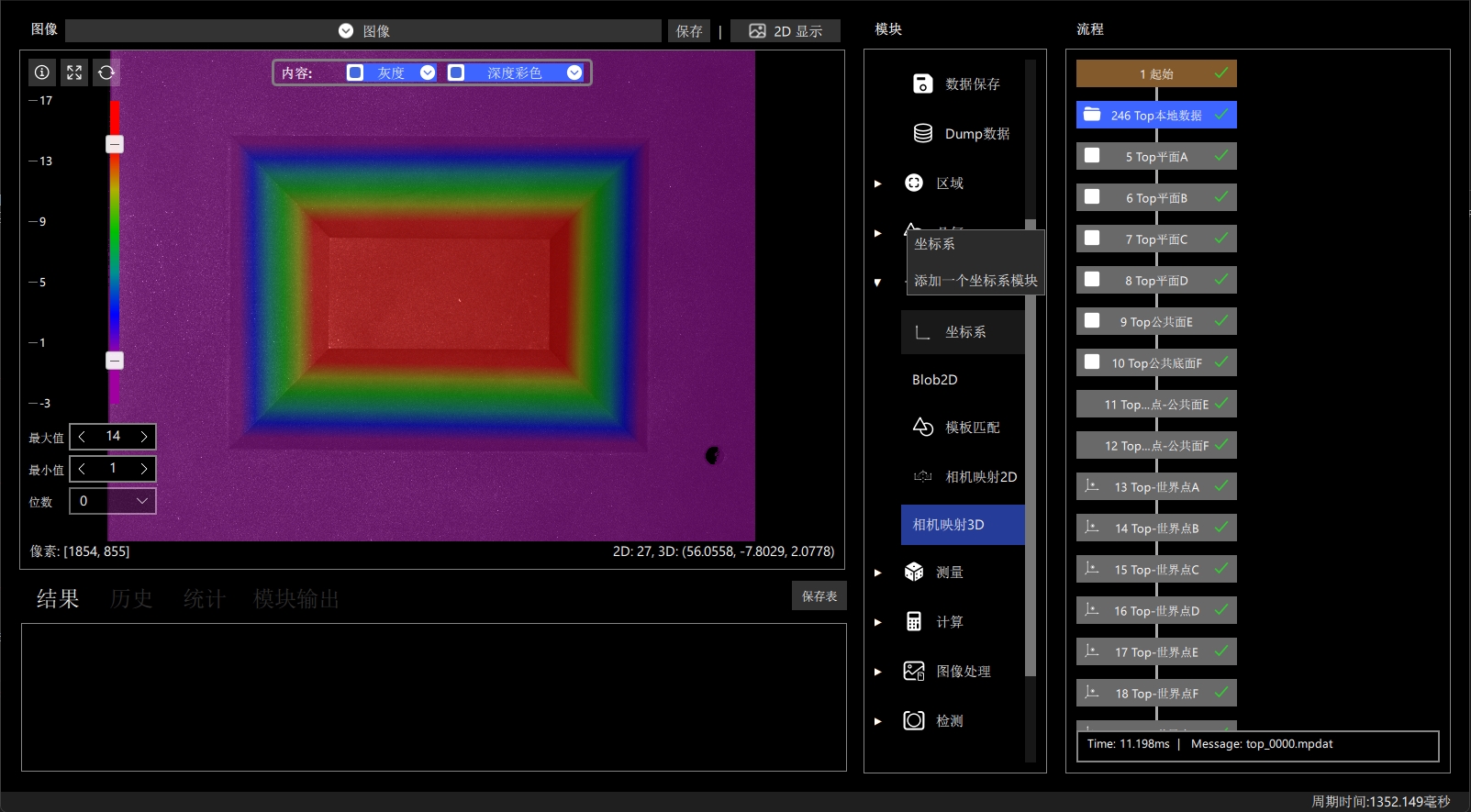
- 使用多平面交点模块计算出平面交点(其余的点也是这么计算,此处不再赘述)
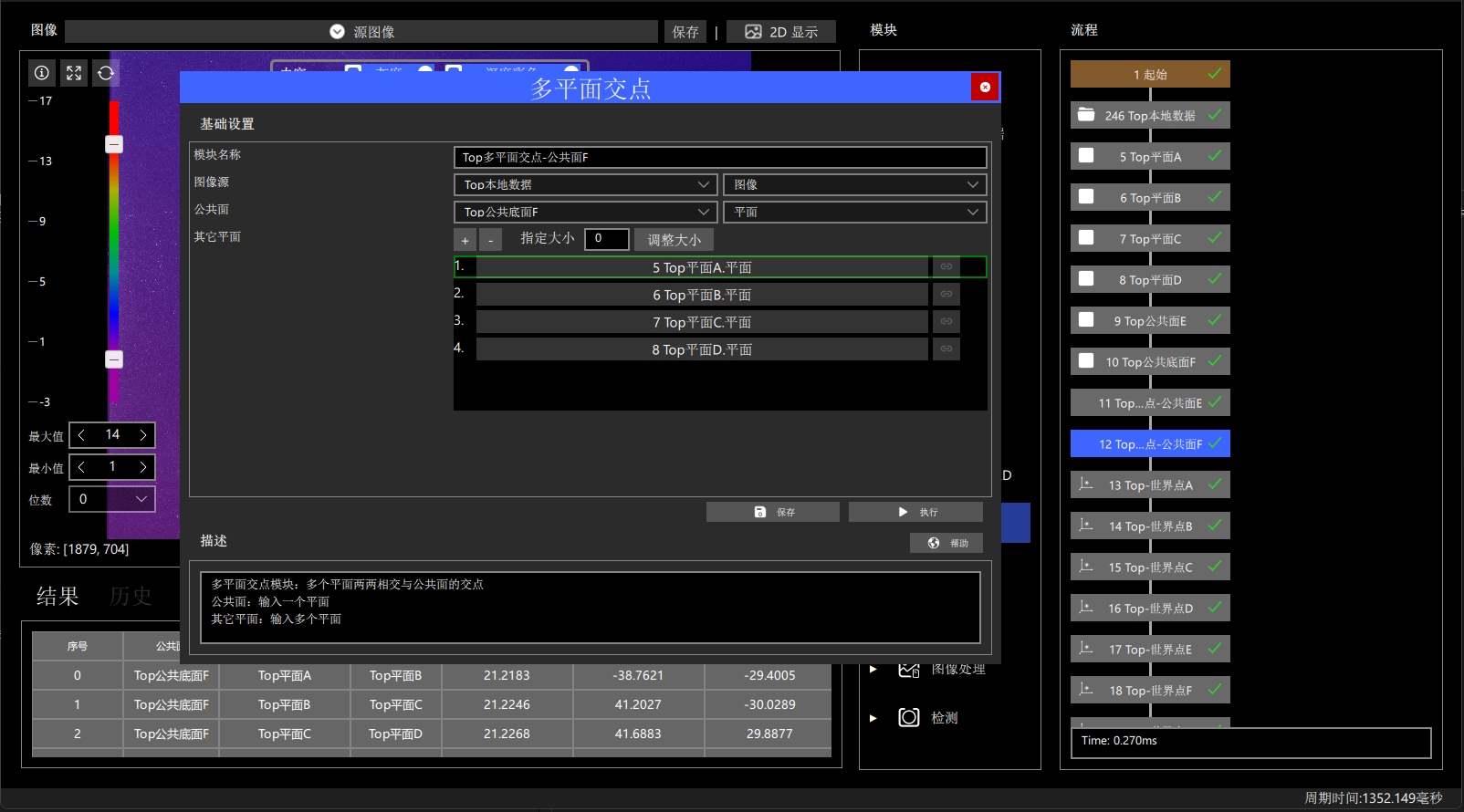
- 对板子正面和反面重复上述操作即可得到正面的四个点和反面的八个点,将这些点按照对应关系分别填入参数中,即可算出转换关系

信息
上面的流程仅作为参考,实际根据不同应用场景的需求进行修改