滤波(点云)
功能介绍
模块位置:图像处理-滤波(点云)
对点云使用滤波处理,包括以下方法:
- 体素滤波:指定尺寸的体素内使用所有点云的重心代替该体素内所有点云,以达到降采样的目的;
- 半径滤波:判断每个点指定半径内点数量是否满足阈值,来剔除离群点;
- 统计滤波:对每个点的k邻域点的平均距离进行统计,剔除距离满足一定条件的点;
输入
| 输入 | 类型 | 说明 |
|---|---|---|
| 图像源 | 图像/点云 | 输入图像 |
参数说明
方法 - 体素滤波
体素边长
点云下采样时使用的立方体的大小。体素尺寸越大点云越稀疏;
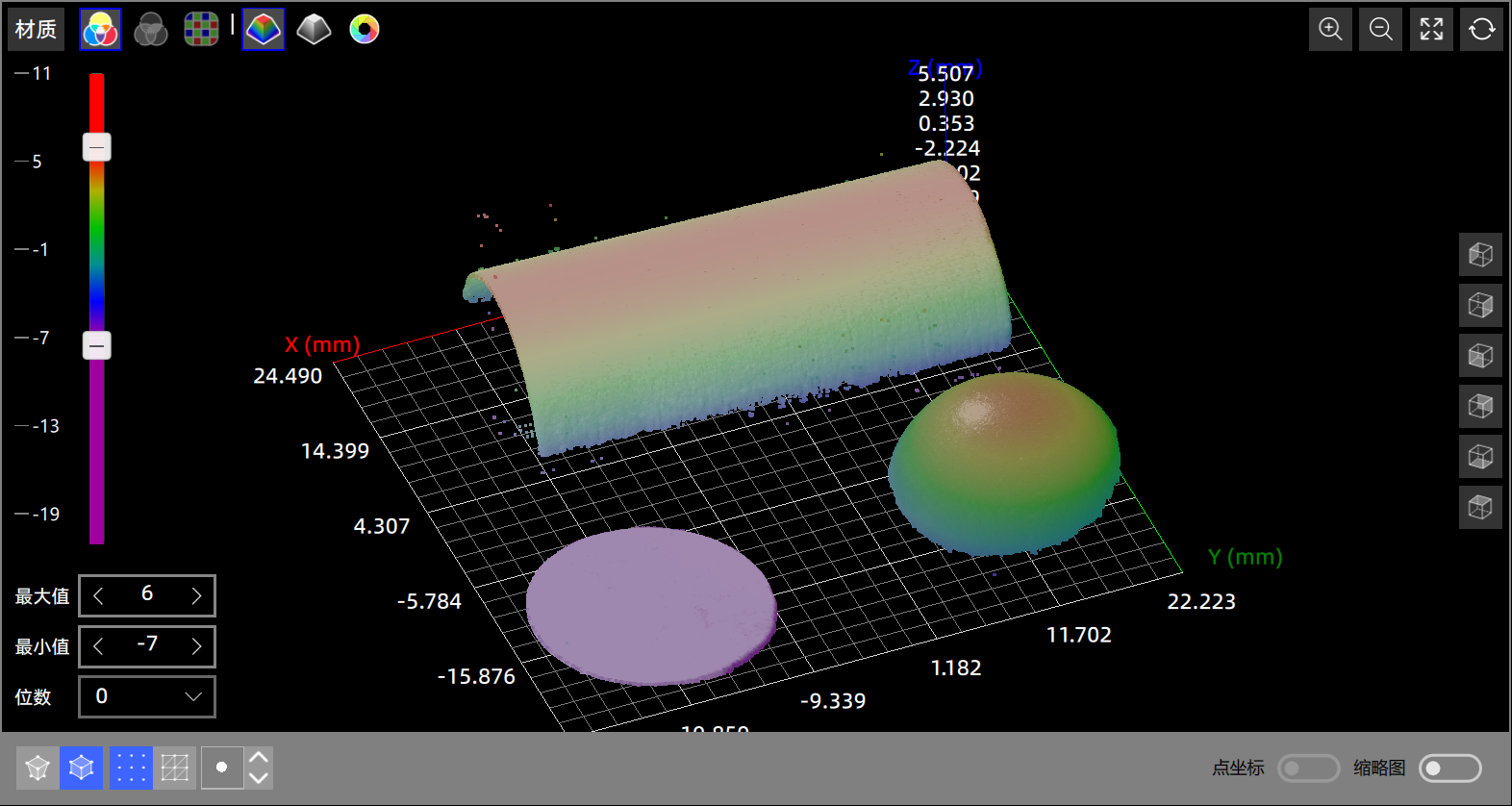 | 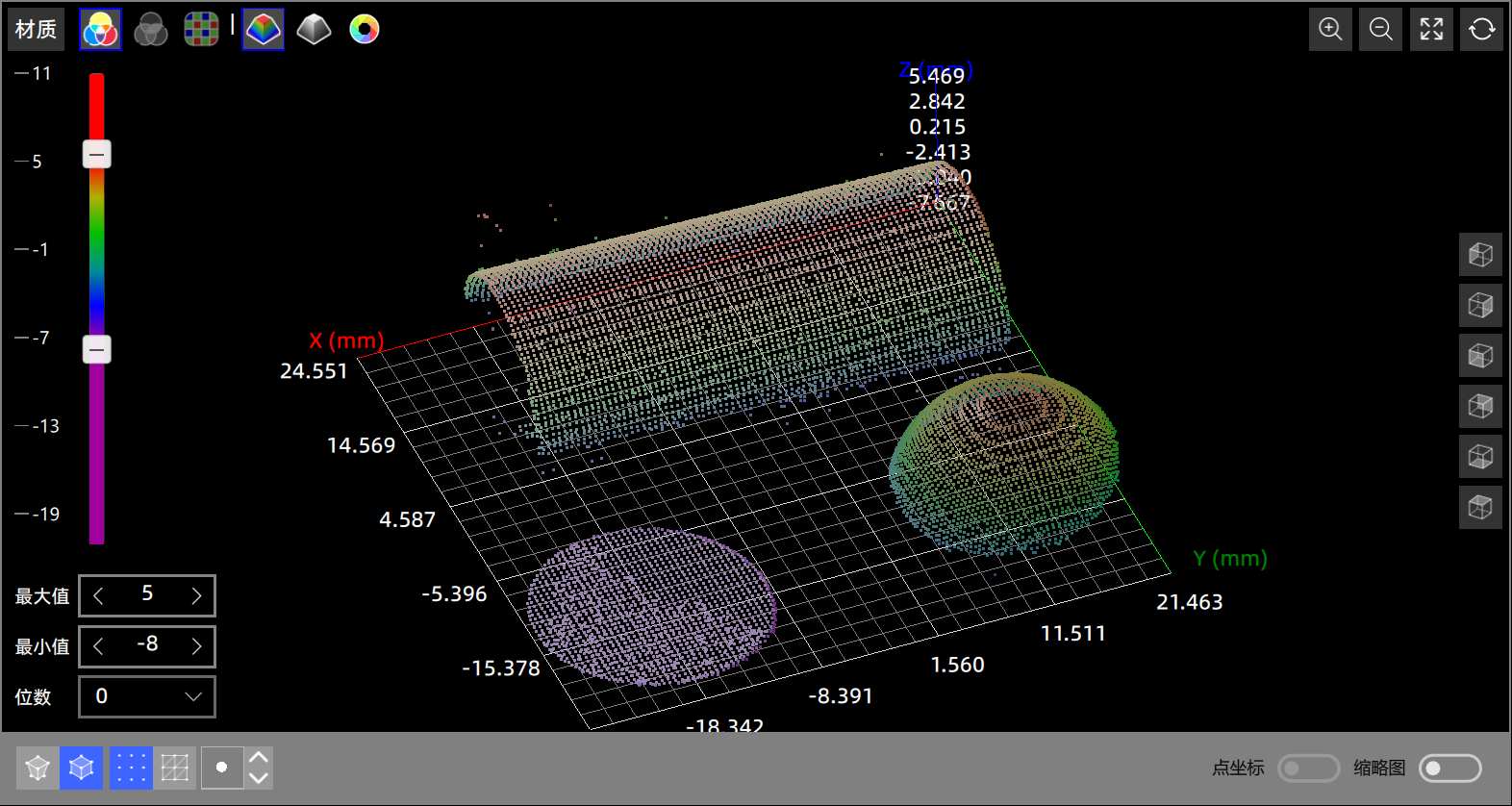 |
|---|---|
| 降采样前 | 降采样后,体素尺寸 = 0.5 |
方法 - 半径滤波
半径
搜索邻域的半径大小。
最小邻居
半径内最少邻近点数量阈值。
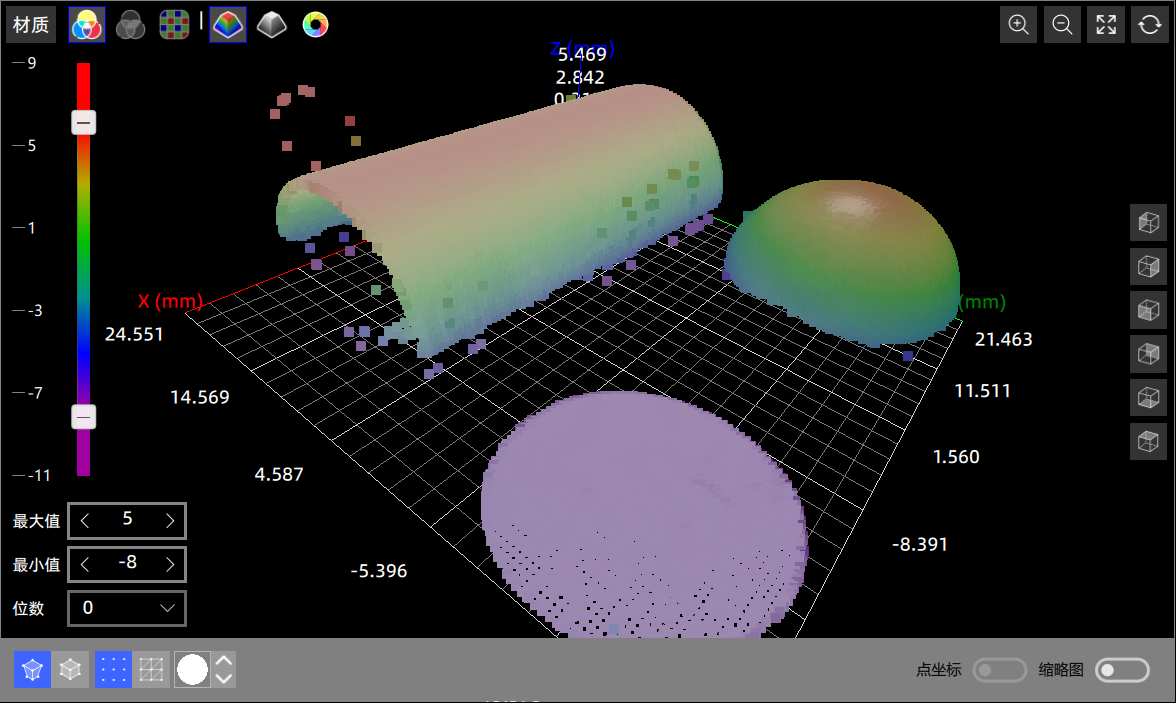 | 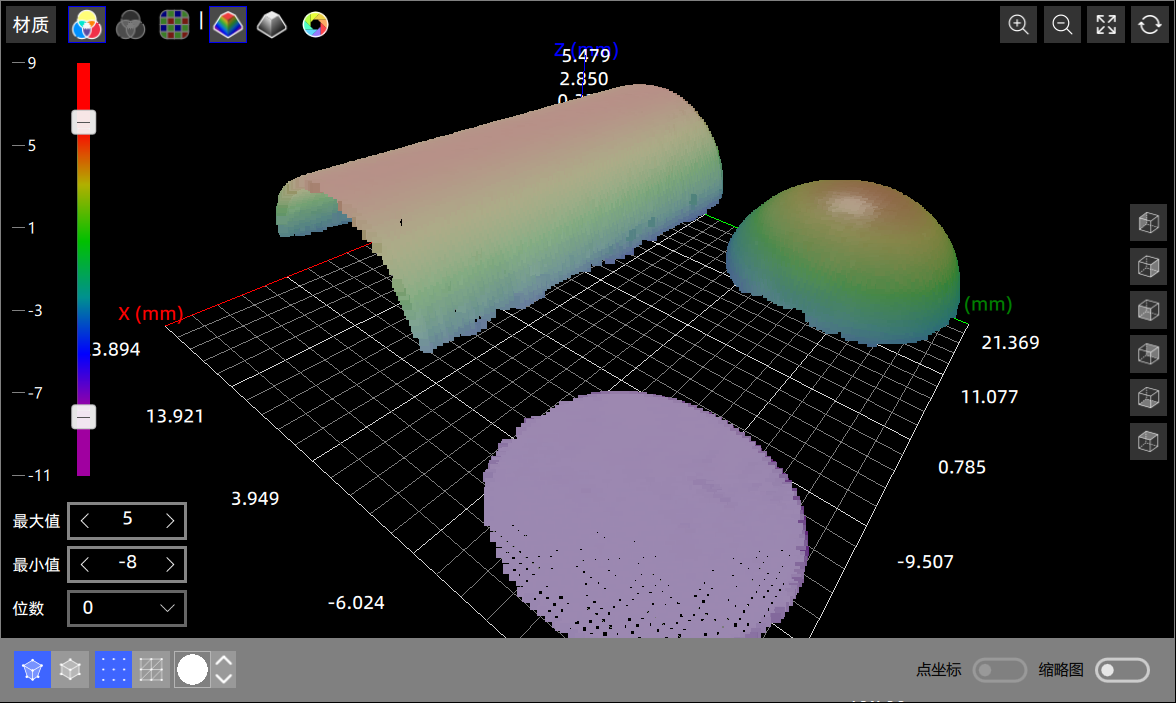 |
|---|---|
| 半径滤波前 | 半径滤波后稀疏杂点被滤除(半径 = 0.9,最小邻居 = 8) |
方法 - 统计滤波
K均值�
用于统计分析的邻近点数量。
标准差乘数
某点的邻域点的平均距离 > 全局平均距离 + 标准差乘数 * σ,则判定为离群点;
|  |
|---|---|
| 统计滤波前 | 统计滤波后稀疏杂点被滤除,相比半径滤波更少点被滤除(K均值 = 8,标准差乘数 = 1) |
输出
| 输出 | 类型 | 默认启用 | 额外启用条件 | 说明 |
|---|---|---|---|---|
| 输出点云 | 点云 | 是 | / | 输出处理后的点云 |