聚类提取
功能介绍
模块位置:图像处理-聚类提取
根据设定的距离阈值 tolerance为判据,将空间中距离小于该阈值的点归为同一簇,大于该阈值的点划分至不同簇,从而实现点云数据的自动分割。
使用场景
对多个明显分离的点云中分割出点云簇,对每个点云进行单独处理;例如工业分拣与抓取;
示例说明
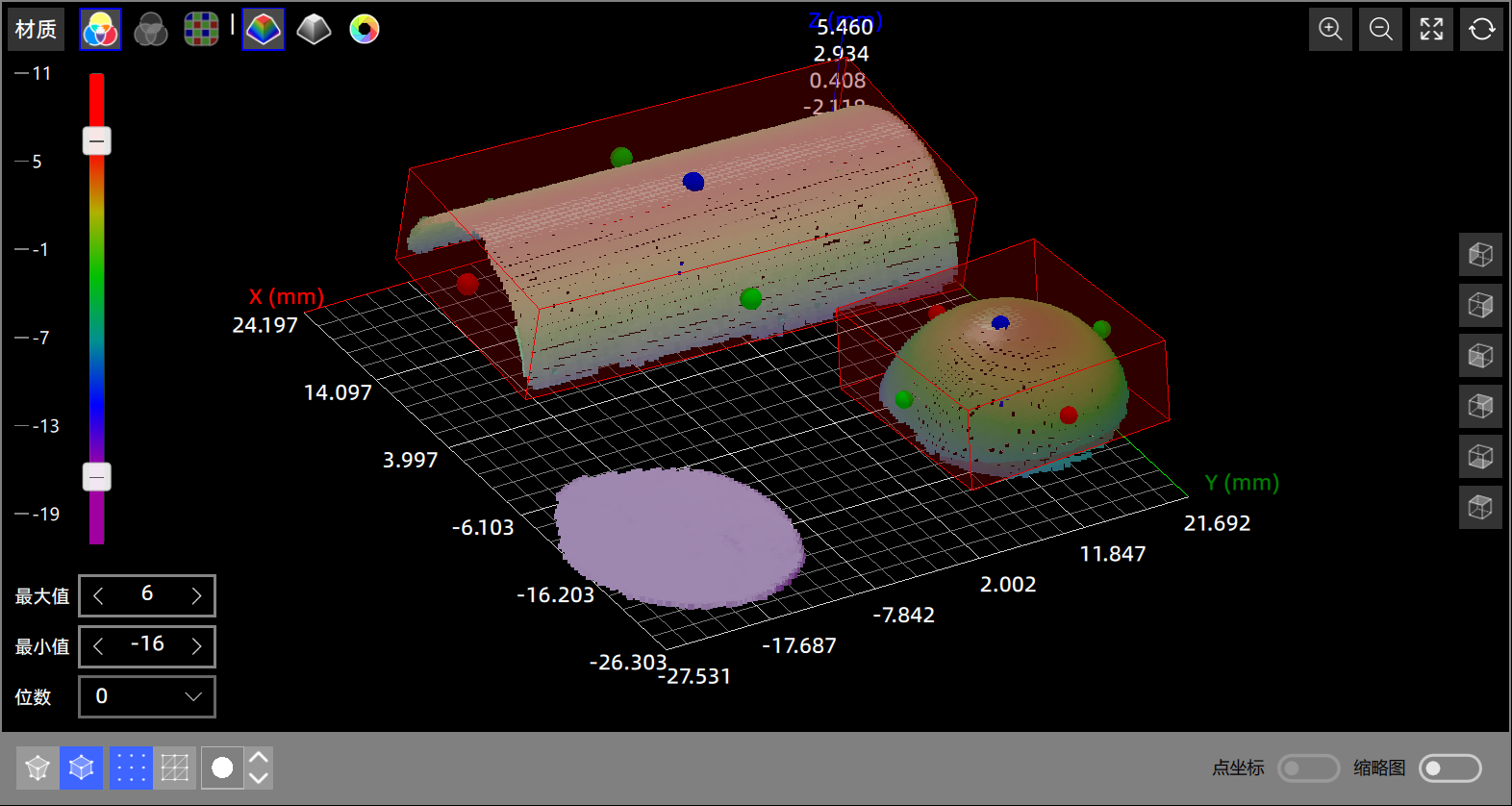
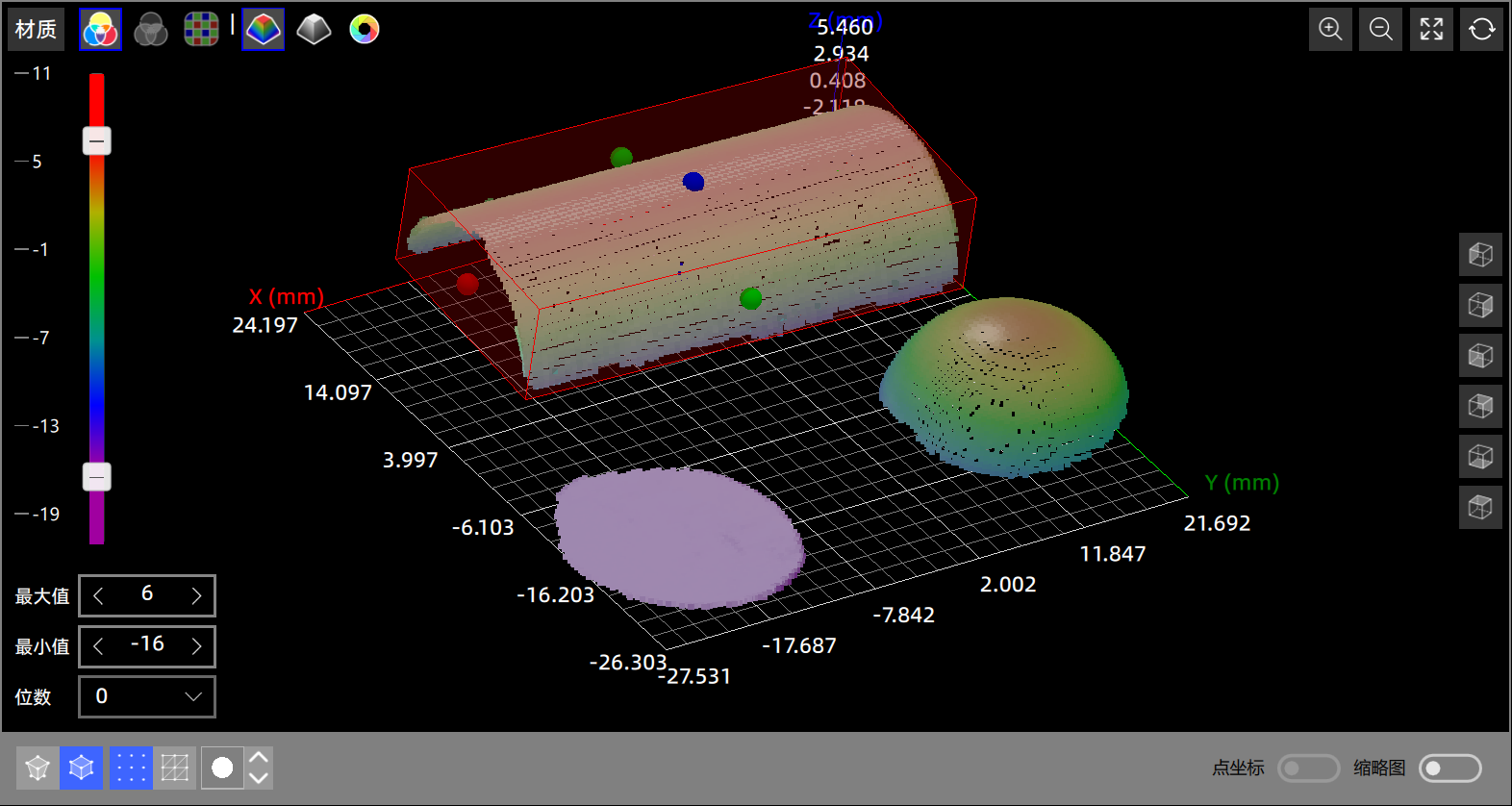
将空间中的点云进行聚类提取,得到每一聚类结果的最小外接旋转立方体;三簇点云之间最小距离分别为6.4、8.6、7.8,故设置距离距离阈值为6.2,则大于该距离的点云被分割成不同的点云簇;最终被分割为三个点云簇;
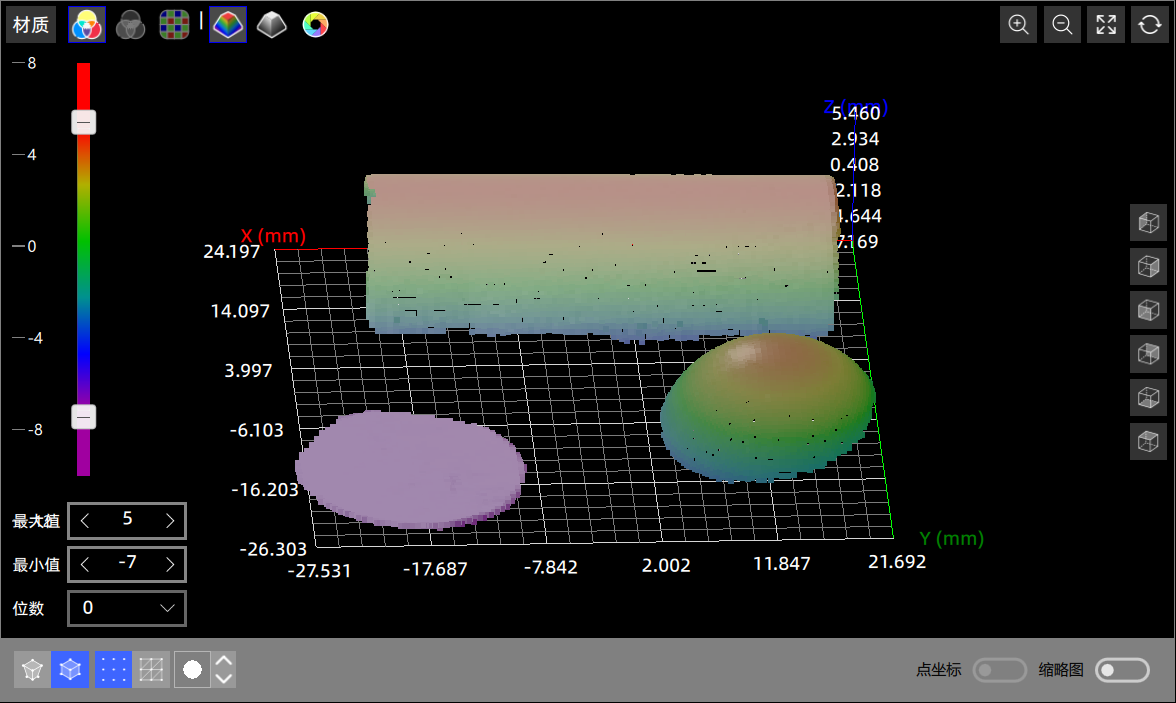 | 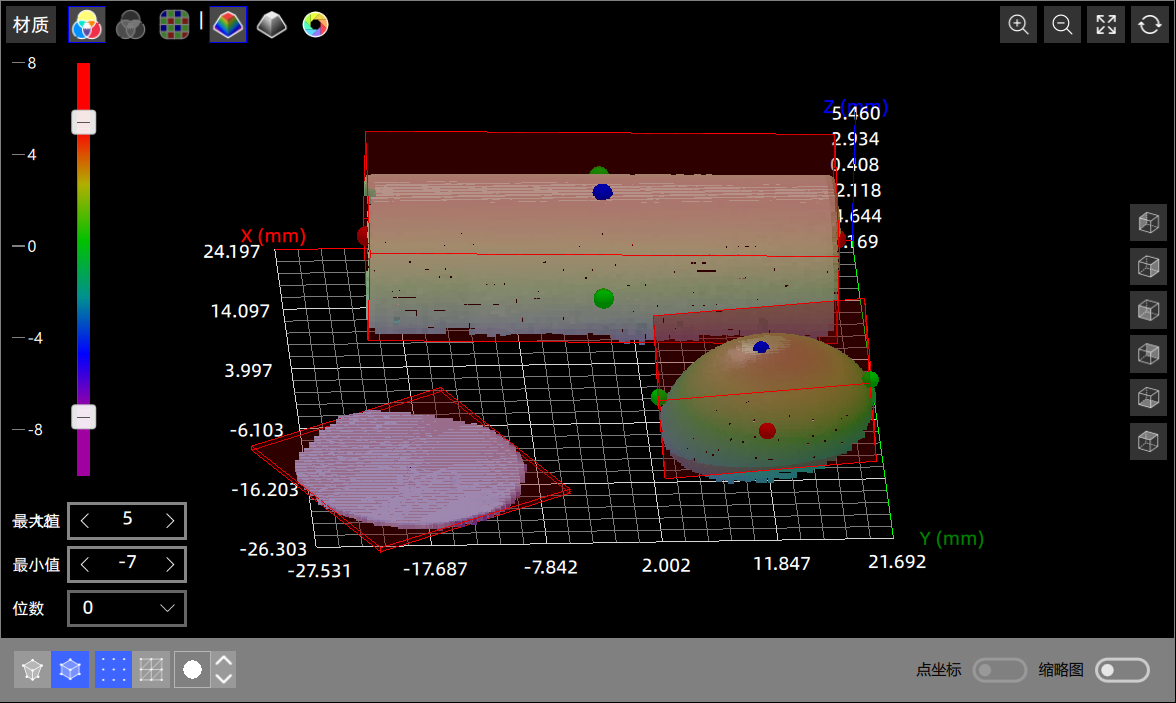 |
|---|---|
| 待聚类的点云 | 聚类结果 |
输入
| 输入 | 类型 | 说明 |
|---|---|---|
| 输入图像 | 点云 | / |
参数说明
公差
聚类距离阈值,决定相邻点的最大间距,距离小于该距离阈值的点云被分为一类;单位与点云单位一致;
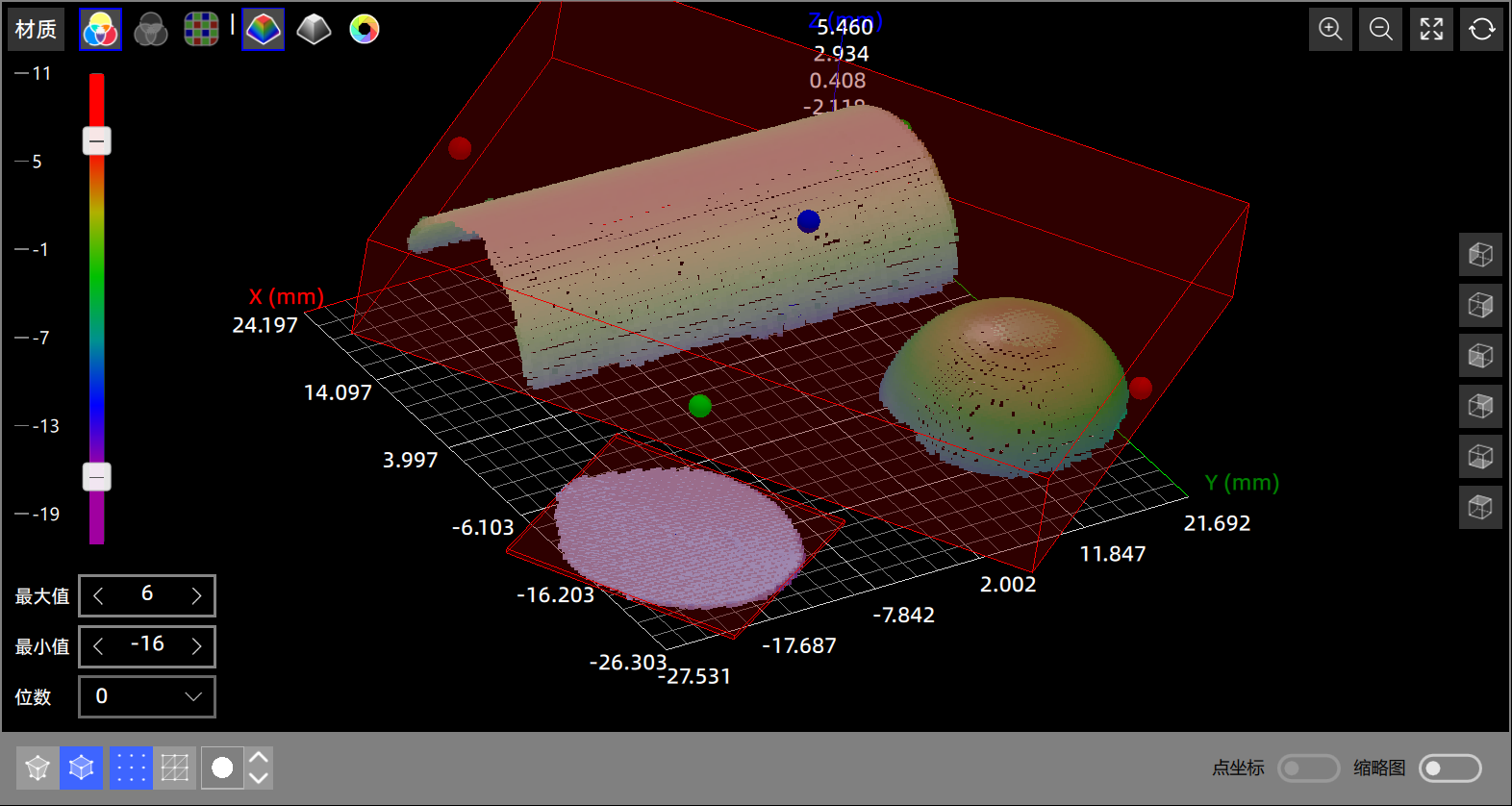 | 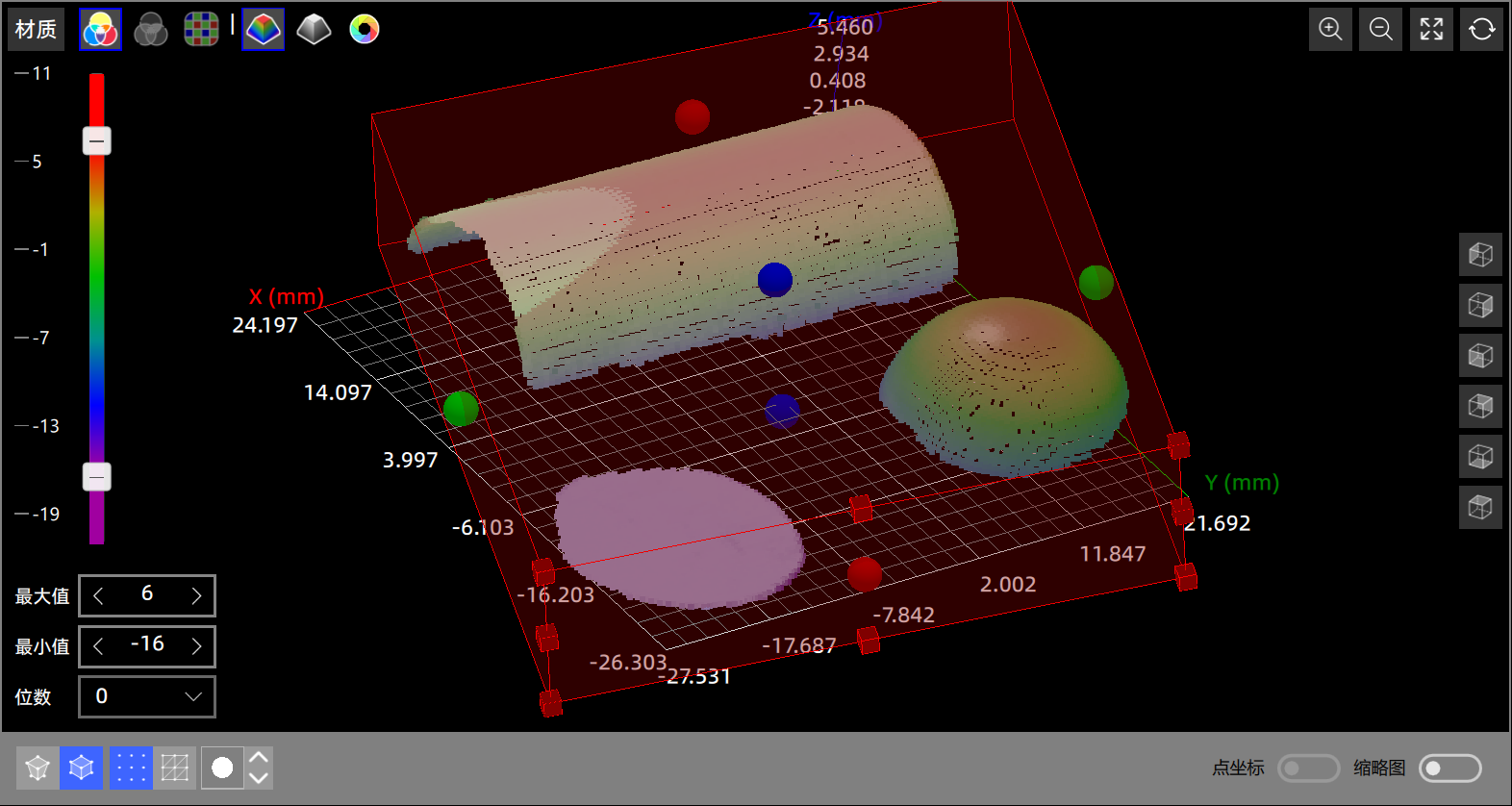 |
|---|---|
| 聚类距离阈值 = 7 | 聚类距离阈值 = 9 |
点数范围
聚类的最小点数和最大点数,最小点数用于过滤噪声点,最大点数用于避免过度合并;
 |  |
|---|---|
| 最小点数 = 2000 | 最小点数 = 4000 |
质量
空间质量因子,范围[0,1],越大则聚类距离阈值越严格;越小则聚类距离阈值越宽松,适用于噪声较大的数据;
输出
| 输出 | 类型 | 默认启用 | 额外启用条件 | 说明 |
|---|---|---|---|---|
| 3D区域列表 | 区域集 | 否 | / | 每个聚类点云的最小外接旋转立方体 |