滤波3D
功能介绍
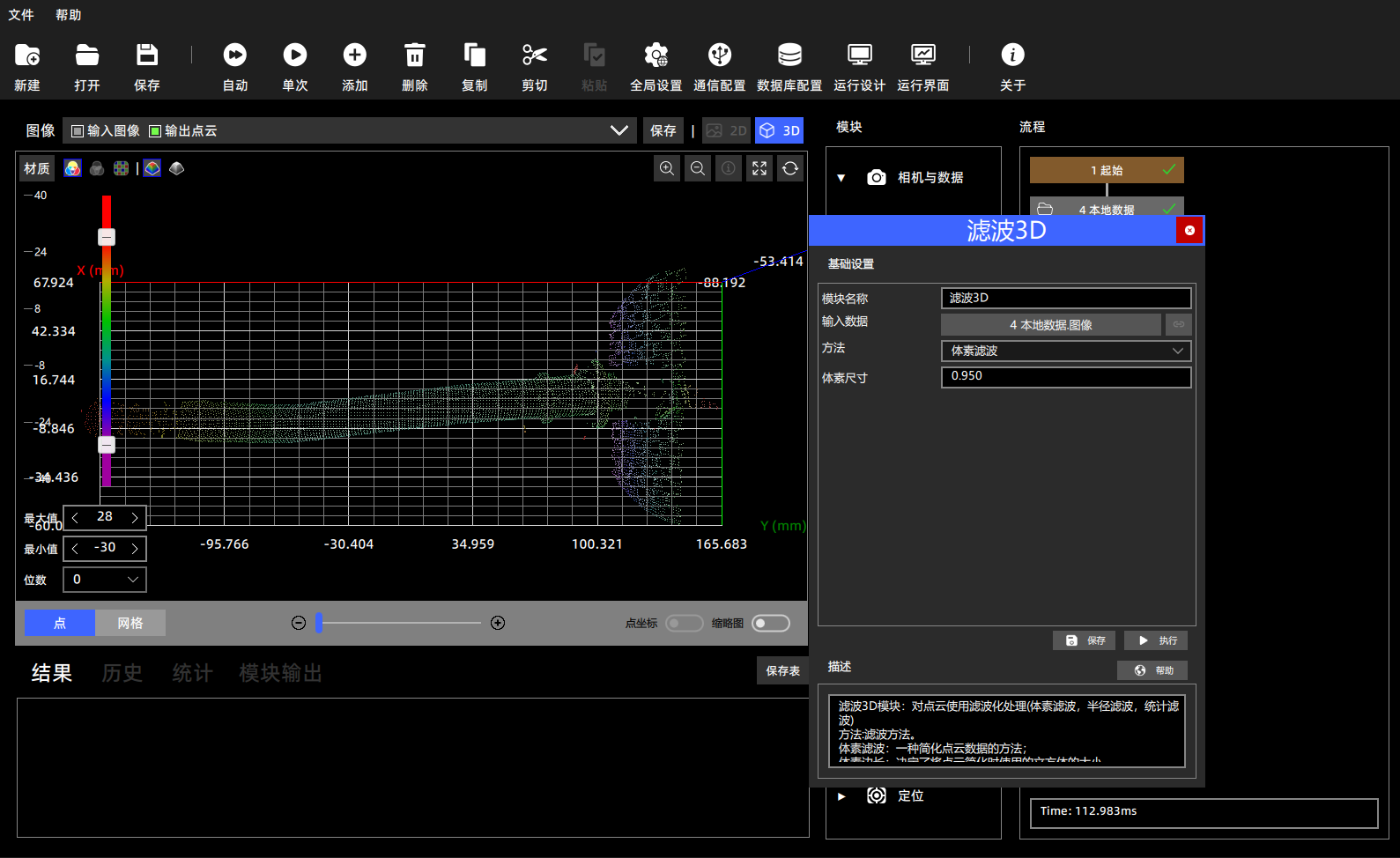
滤波3D模块:对点云使用滤波化处理(体素滤波,半径滤波,统计滤波)
模块位置:图像处理-滤波3D
使用说明
参数说明
- 输入数据:输入图像/点云
- 方法:滤波方法(体素滤波:一种简化点云数据的方法/半径滤波:去除指定半径内邻居太少的点/统计滤波:使用统计分析过滤噪声)
- 体素边长:决定了将点云简化时使用的立方体的大小
- 半径:搜索半径
- 最小邻居:所需的最小邻居数
- K均值:要分析的最近邻居的数量
- 标准差乘数:将点分类为异常值的阈值
案例流程
-
获取源数据,可以选择相机或者加载本地数据,设定参数
-
选择滤波方法
-
执行滤波
信息
上面的流程仅作为参考,实际根据不同应用场景的需求进行修改