拟合球
功能介绍
模块位置:几何-拟合球
根据3D点集使用随机采样一致性拟合球。
拟合球后可同时计算球形状探测误差,计算所有参与拟合点到拟合球心的距离,将距离值再与拟合球的半径做差,滤除部分数据后,将最大值减去最小值的差值即为球形状探测误差。
 |  |
|---|---|
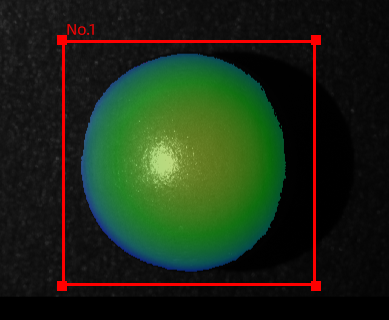
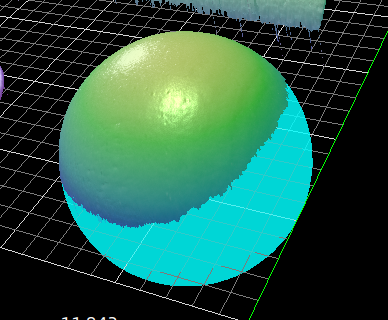
| 输入:框选需要拟合的区域 | 输出:拟合球 |
使用场景
在三维空间中识别和测量球形物体,如球体、半球体等。
输入
点云输入
| 输入 | 类型 | 说明 |
|---|---|---|
| 输入点云 | 点云 | 输入方式是选择输出点云的模块。 |
区域输入
| 输入 | 说明 |
|---|---|
| 通过区域 | 3D区域。 输入区域 查看详细说明:区域类型(绘制和继承)、区域列表、启用坐标系、坐标系。 |
参数说明
离群点比例
范围(0,1),用于控制在进行球拟合时对离群点的处理程度。
伪随机
随机种子,当开启后随机�种子为0,即同样数据拟合出来的球结果相同。
球形状探测误差
是否计算球形状探测误差。
过滤比例
计算形状探测误差时滤除部分数据比例。用于球形状探测误差,排序后过滤比例外的数据(范围0到1)。
输出
| 输出 | 类型 | 默认启用 | 额外启用条件 | 说明 |
|---|---|---|---|---|
| 区域列表 | 区域集 | 否 | 在输出设置中勾选 | / |
| 区域中心列表 | 2D点集 | 否 | 在输出设置中勾选 | / |
| 球列表 | 球集 | 是 | / | / |
| 直径 | 实数列表 | 是 | / | / |
| 均方根 | 实数列表 | 是 | / | / |
| 球形状探测误差 | 实数列表 | 否 | 选择“继承”,勾选 | / |
| 中心圆 | 2D圆 | 是 | / | / |
| 球心列表 | 3D点集 | 是 | / | / |