3D点
功能介绍
3D点模块用来生成一个3D点,可以通过区域来算出一个新的点,或者通过2D点和平面和相机标定参数算出一个点或手动构造出一个点。
模块位置:几何-3D点
使用说明
参数说明
- 图像源:输入图像
- 创建方法:通过区域,通过2D点和平面,手动
通过区域
- 区域方法:绘制,继承 (参数同区域模块设置操作,此处不再赘述)
- 方法:计算输出3D点的方法
- 平均XYZ:对所有的点xyz取平均生成一个新的3D点
- 中心XY平均Z:X,Y是几何中心点(不过滤),Z按过滤后的点数求平均
- Z最小点XYZ:首先根据Z排序后过滤,然后取Z最小值真实点
- Z最大点XYZ:首先根据Z排序后过滤,然后取Z最大值真实点
- 中值Z: 首先根据Z排序后过滤,然后取Z中值真实点
- X过滤比例:按X值过滤
- Y过滤比例:按Y值过滤
- Z过滤比例:按Z值过滤
通过2D点和平面
- 点2D: 输入的2D点
- 平面: 输入平面,希望投影到的平面
- 标定参数:相机的标定参数,可以通过SizectorS相机模块或本地数据获得
- 考虑畸变:投影时是否考虑相机畸变
- 像素合并:是否考虑像素合并
手动
- 手动输入xyz构造一个3D点
案例流程
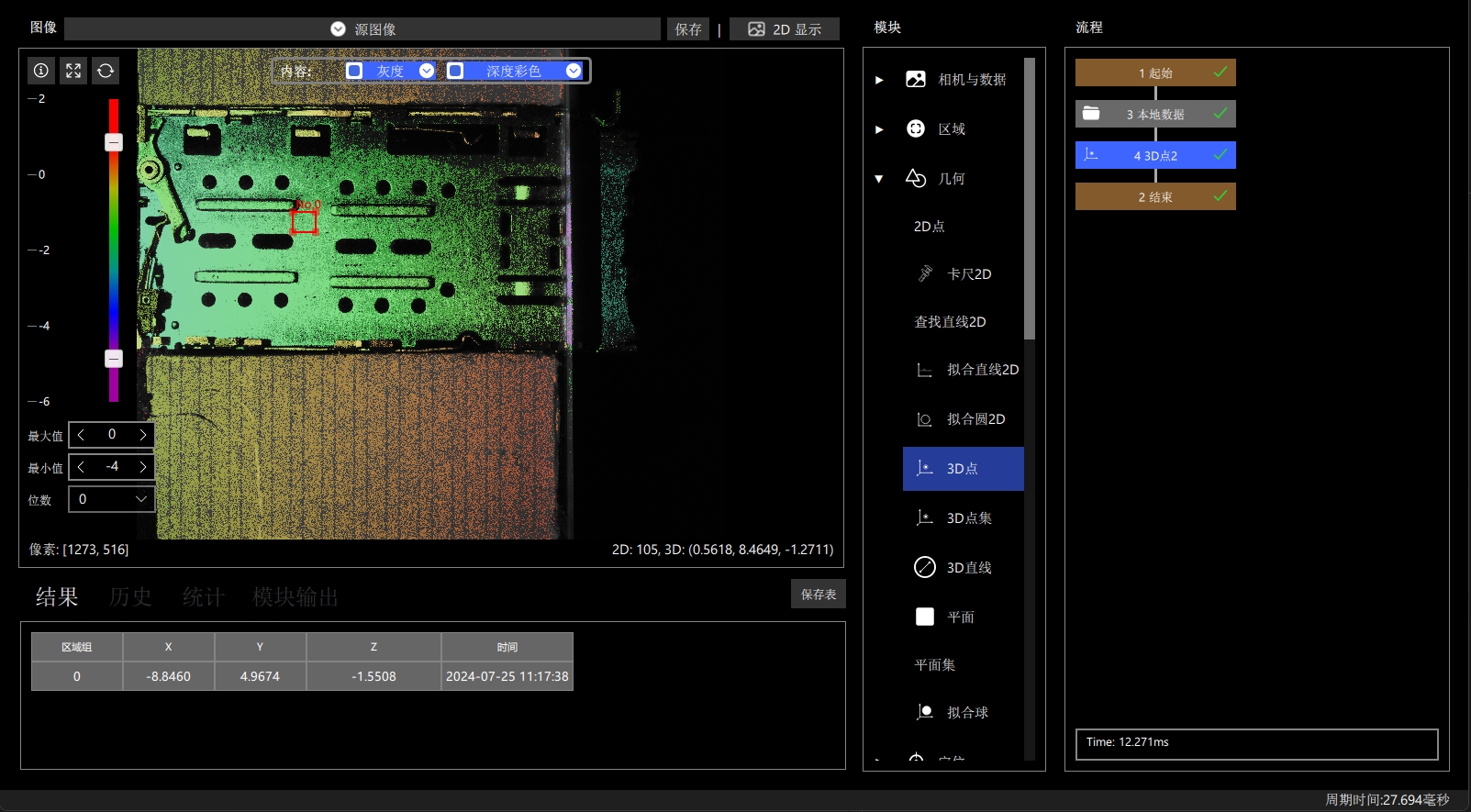
- 获取源数据,可以选择相机或者加载本地数据

- 由选定区域的数据计算得到3D点

信息
上面的流程仅作为参考,实际根据不同应用场景的需求进行修改