拟合圆柱(点云)
功能介绍
框选点云拟合一个圆柱
模块位置:几何-拟合圆柱(点云)
使用说明
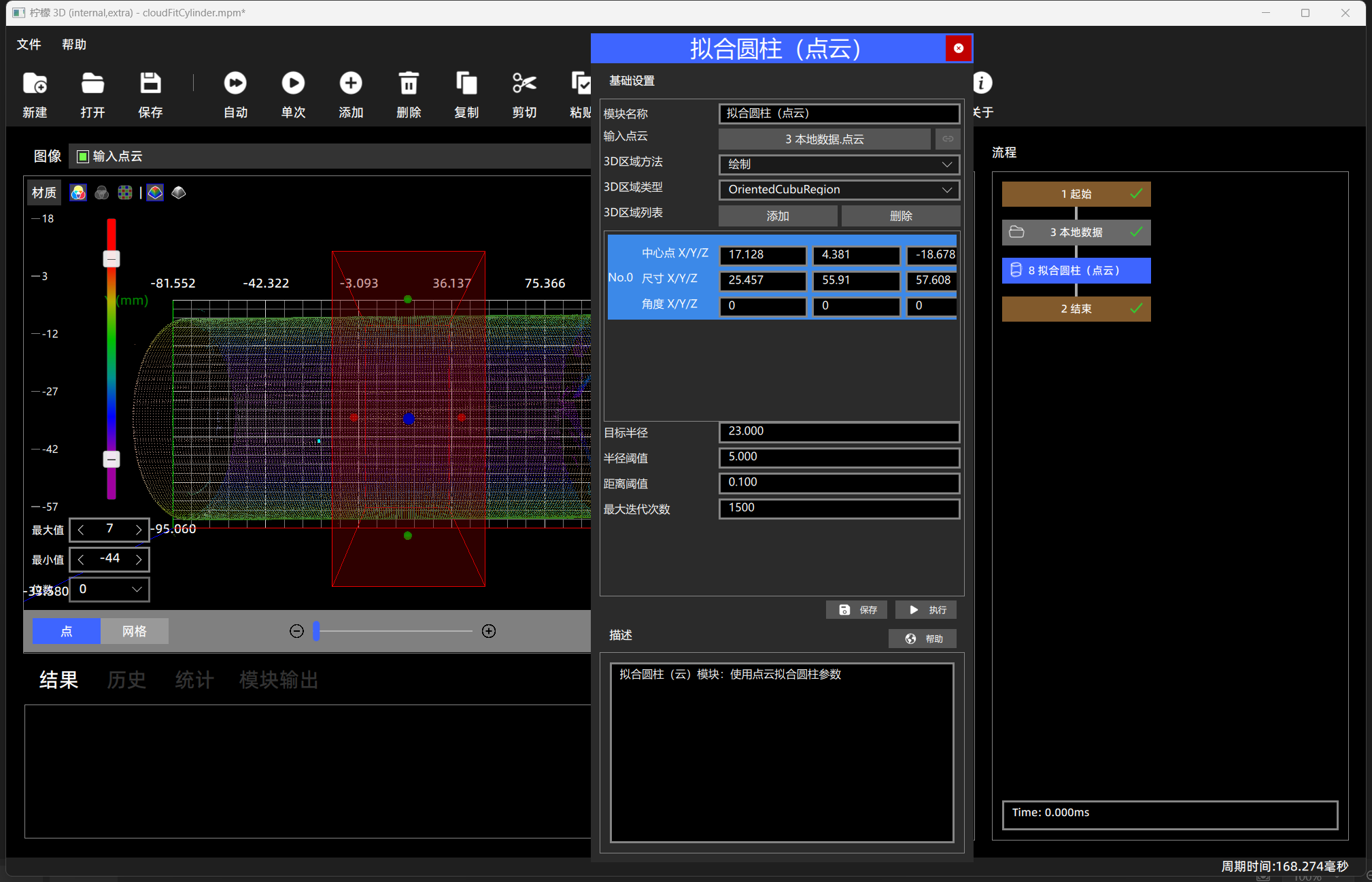
参数说明
- 输入点云:点云数据
- 3D区域方法:绘制和继承
- 3D区域类型:旋转立方体、全区域(使用点云中所有数据)
- 3D区域列表:可添加和删除区域
- 目标半径:已知被测物半径大致范围时可在目标半径周围一定范围来搜索圆柱半径,减少算法迭代时间
- 半径阈值:在目标半径以半径阈值为公差搜索圆柱半径;范围越精确算法迭代时间越短
- 距离阈值(内点):拟合圆柱时,用于剔除异常数据的内点阈值
- 最大迭代次数:超过设置迭代次数时即使未得到拟合结果也退出迭代
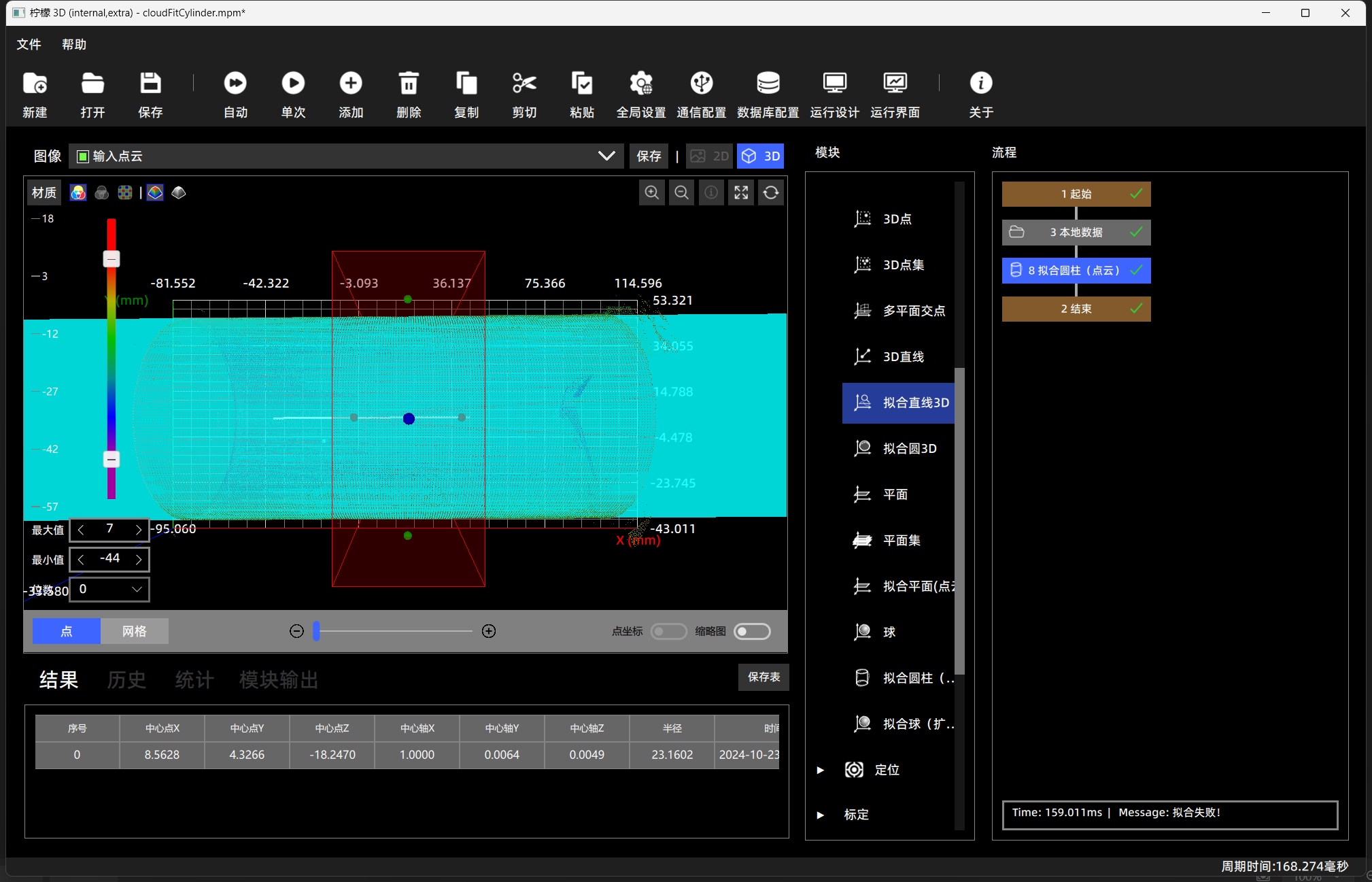
案例流程
-
加载点云数据
-
添加圆柱拟合点云模块,调整旋转立方体区域框选目标点云,设置目标半径、半径阈值,执行模块,查看拟合结果
信息
上面的流程仅作为参考,实际根据不同应用场景的需求进行修改