3D点
功能介绍
模块位置:几何-3D点
3D点模块可以通过区域来算出一个新的点,或者通过2D点、平面和相机标定参数算出一个点,或手动构造出一个点。
创建方法
可以通过多种方式创建3D点。
| 创建方法 | 输入 | 输出 |
|---|---|---|
| 通过区域 | 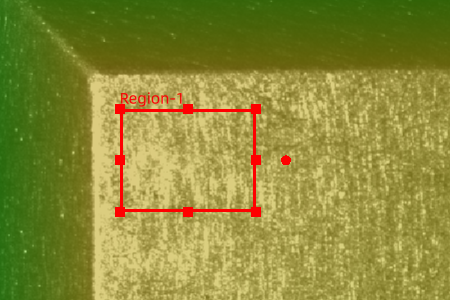 |  |
| 通过2D点和平面 | 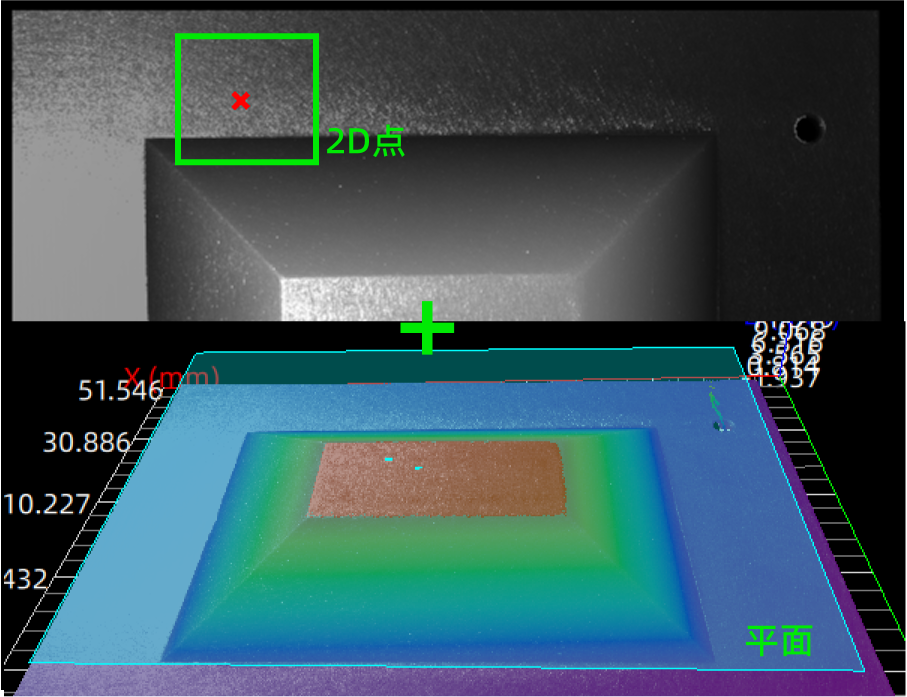 | 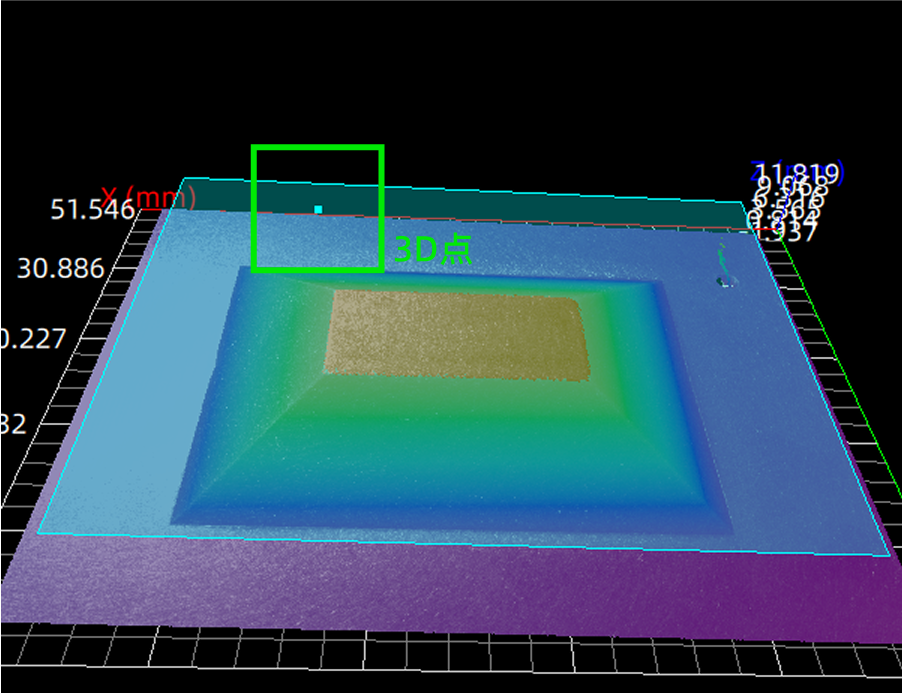 |
| 通过手动 |  |  |
| 通过图像上像素点 | 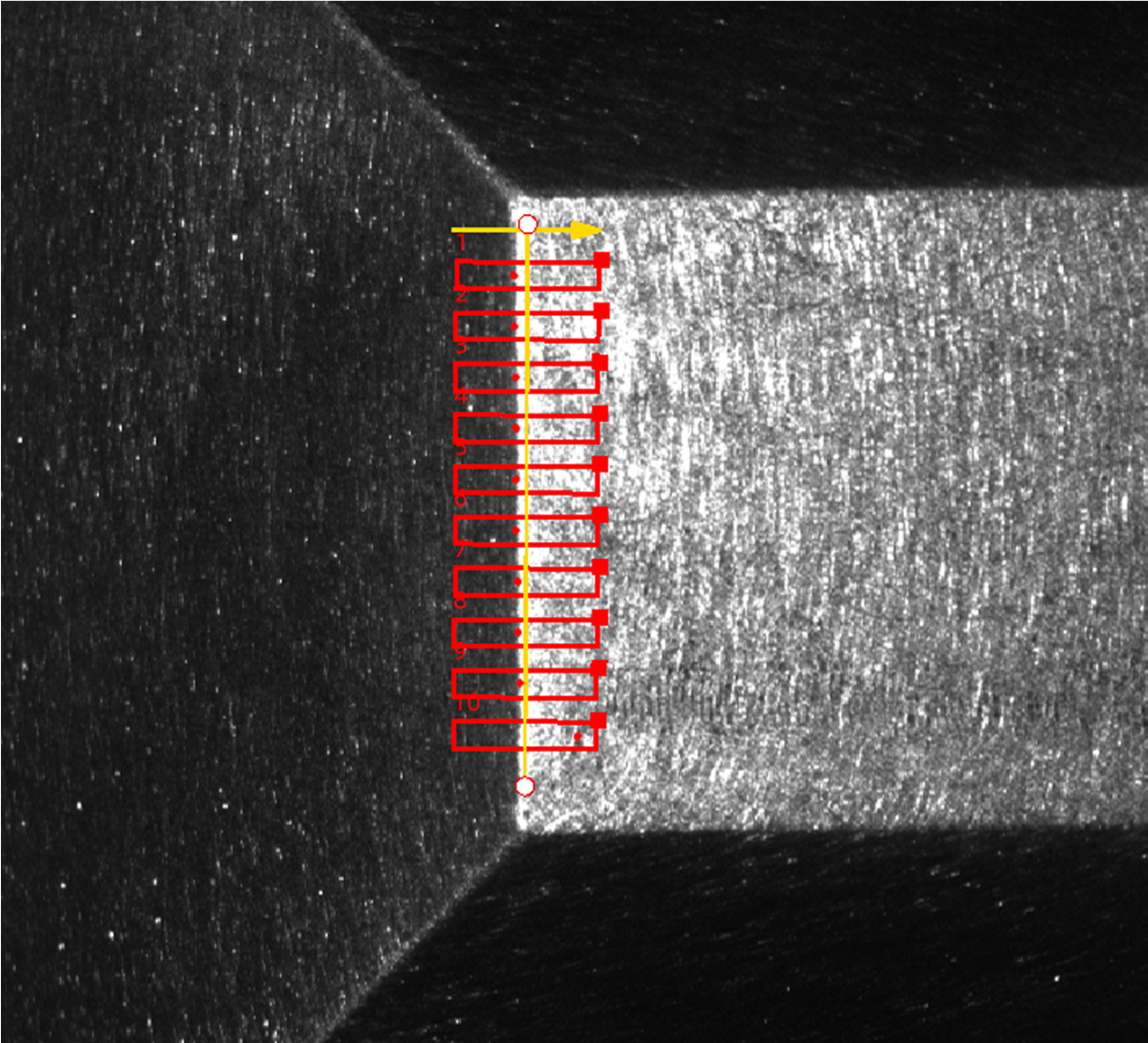 | 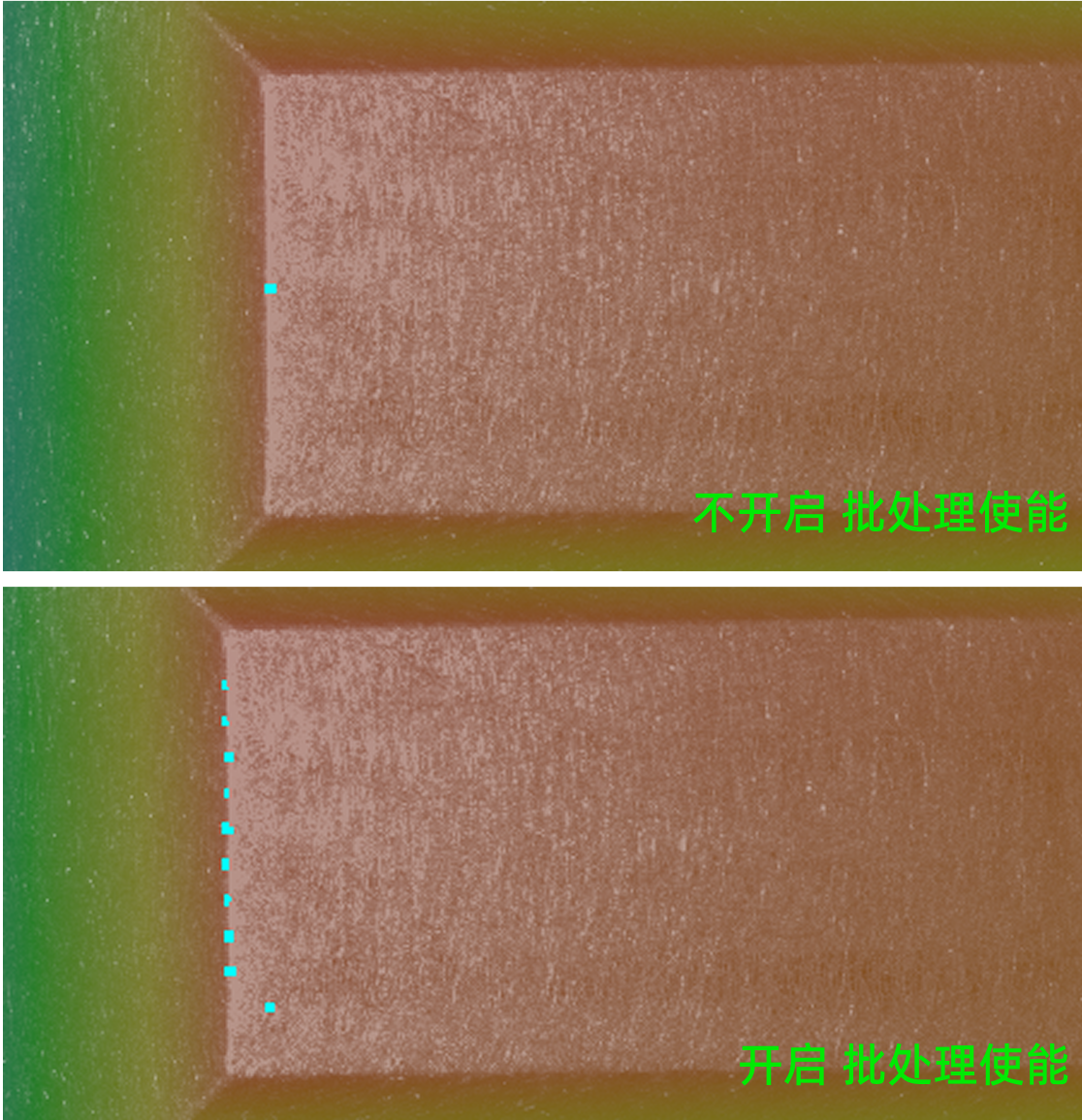 |
批处理使能
创建方法选择“通过区域”,可以使用批处理使能。不勾选批处理使能生成一个平均值3D点,勾选后根据2D点集生成多个3D点。具体使用方法查看批处理使能。
使用场景
在从图像中提取关键特征3D点,为后续的处理提供基础数据,以便进行进一步的分析或测量。
基础输入
| 输入 | 类型 | 说明 |
|---|---|---|
| 输入图像 | 图像 | 输入方式是选择输出图像的模块。 |
创建方法:通过区域
基础输入
| 输入 | 说明 |
|---|---|
| 通过区域 | 通过绘制或继承得到一个3D点坐标。输入区域 查看详细说明:区域类型、区域列表、启用坐标系、坐标系。 |
参数说明
1.区域计算方法
平均XYZ
�对所有的点xyz取平均生成一个新的3D点。
中心XY平均Z
X,Y是几何中心点(不过滤),Z按过滤后的点数求平均。
Z最小点XYZ
首先根据Z排序后过滤,然后取Z最小值真实点。
Z最大点XYZ
首先根据Z排序后过滤,然后取Z最大值真实点。
中值Z
首先根据Z排序后过滤,然后取Z中值真实点。
2.X过滤比例
按X值过滤
3.Y过滤比例
按Y值过��滤
4.Z过滤比例
按Z值过滤
创建方法:通过2D点和平面
输入
| 输入 | 类型 | 说明 |
|---|---|---|
| 2D点 | 2D点 | / |
| 平面 | 平面 | / |
| 标定参数 | 标定参数 | 相机的标定参数,可以通过SizectorS相机模块或本地数据获得。 |
| 像素合并 | 布尔值 | 是否考虑像素合并。 |
参数说明
考虑畸变
投影时是否考虑相机畸变。
创建方法:手动
输入
| 输入 | 类型 | 说明 |
|---|---|---|
| X | 实数 | 手动输入或关联流程中的值。 |
| Y | 实数 | 手动输入或关联流程中的值。 |
| Z | 实数 | 手动输入或关联流程中的值。 |
创建方法:通过图像上像素点
输入
| 输入 | 类型 | 说明 |
|---|---|---|
| 图像上像素2D点集 | 2D点集 | / |
输出
| 输出 | 类型 | 默认启用 | 额外启用条件 | 说明 |
|---|---|---|---|---|
| 区域列表 | 区域集 | 否 | 在输出设置中勾选 | / |
| 区域中心列表 | 2D点集 | 否 | 在输出设置中勾选 | / |
| 3D点 | 3D点 | 是 | / | / |
| 3D点集 | 3D点集 | 否 | 勾选“批处理使能” | / |