查找直线3D
功能介绍
模块位置:几何-查找直线3D
通过卡尺区域识别2D图像中的边缘,输出一组拟合点集2D并处理为3D点集,然后在3D图像中拟合一条直线。还可以规定直线所在的平面。
| 查找方法 | 图像源1 | 图像源2 |
|---|---|---|
| 3D插值 | 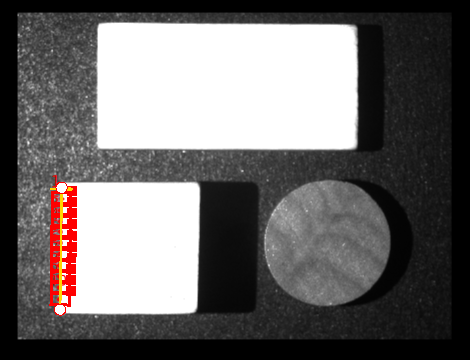 | 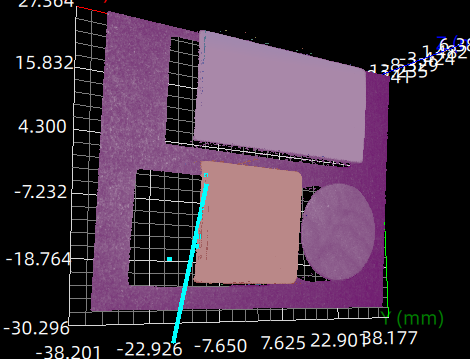 |
| 平面延伸 | | 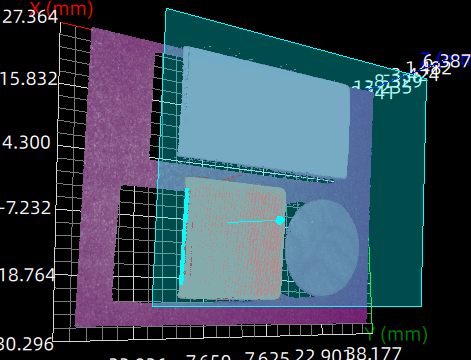 |
使用场景
可以用于检测图像中的直线边缘、识别物体形状。在需要定位和对齐的场景中,可以帮助识别和对齐部件。
查找方法:3D插值
图像输入
| 输入 | 类型 | 说明 |
|---|---|---|
| 图像源1 | 图像 | 输入方式是选择输出图像的模块,主要用于绘制查找的区域。 |
| 图像源2 | 图像 | 输入方式是选择输出图像的模块,主要用于查看直线的3D效果。 |
区域输入
| 输入 | 说明 |
|---|---|
| 卡尺区域 | 通过卡尺在图像中查找边缘点的区域。 |
查找方法:平面延伸
图像输入
| 输入 | 类型 | 说明 |
|---|---|---|
| 图像源1 | 图像 | 输入方式是选择输出图像的模块,主要用于绘制查找的区域。 |
| 图像源2 | 图像 | 输入方式是选择输出图像的模块,主要用于绘制平面和查看直线的3D效果。 |
区域输入
| 输入 | 说明 |
|---|---|
| 卡尺区域 | 通过卡尺在图像中查找边缘点的区域。 |
| 平面区域 | 绘制或继承一个平面。 |
标定参数
| 输入 | 说明 |
|---|---|
| 标定参数 | 相机的标定参数,可以通过SizectorS相机模块或本地数据获得。 |
| 像素合并 | 是�否考虑像素合并。 |
参数说明
极性
任何:区域内,随机黑到白或者白到黑的边缘。
黑到白:区域内,沿着黄色箭头的方向出现的第一个由黑到白的边缘
白到黑:区域内,沿着黄色箭头的方向出现的第一个由白到黑的边缘
卷积核尺寸
用于边缘增强和噪声抑制,最小值为 1,范围 [1, 31]。
边缘阈值
称为梯度阈值(范围从 0 到 255),决定了只有梯度值超过该阈值的边缘点才能被检测到。数值越大,抗噪能力越强,但检测到的边缘数量会减少,有可能导致目标边缘点被排除在外。
考虑畸变
投影时是否考虑相机畸变。
输出
| 输出 | 类型 | 默认启用 | 额外启用条件 | 说明 |
|---|---|---|---|---|
| 3D直线 | 3D直线 | 是 | / | 起点、终点 |
| 最近点 | 3D点 | 是 | / | / |
| 最远点 | 3D点 | 是 | / | / |
| 拟合点集2D | 2D点集 | 是 | / | / |
| 拟合点集3D | 3D点集 | 是 | / | / |
| 平面 | 平面 | 否 | 查找方法选择“平面延伸” | 法向量、经过平面3D点 |