球杆测量
功能介绍
模块位置:测量-球杆测量
根据3D点集拟合球,根据两个球计算球心距离即为球杆测量。
使用场景
用于球杆测量。
示例说明
以下为球杆测量示例。第一步获取图像,第二步获取球拟合区域。参数设置离群点比例设为0.5,伪随机勾选,球形状探测误差不勾选:
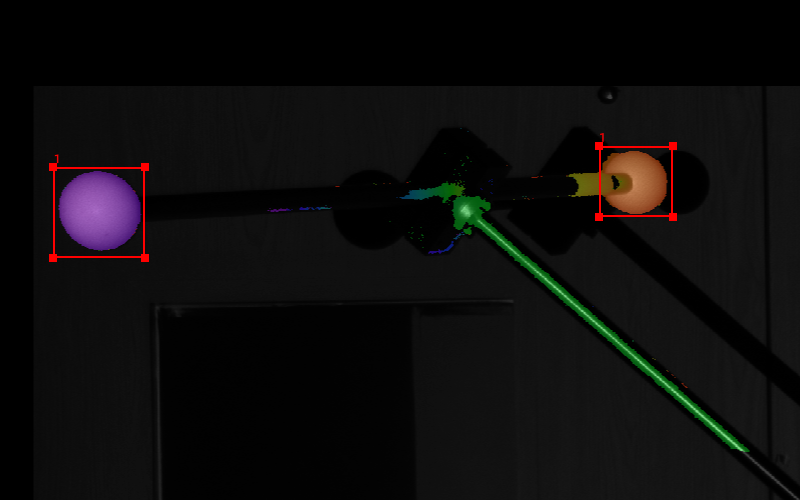 |  |
|---|---|
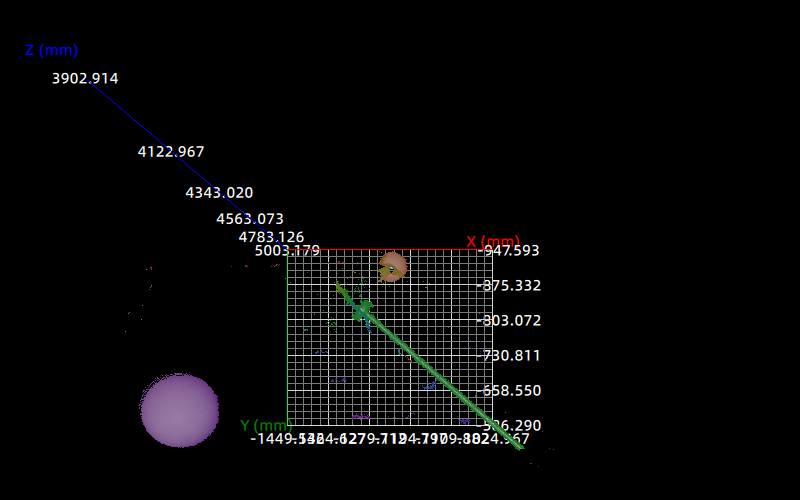
| 区域输入(拟合球),一般由区域模块输出得到 | 3D效果(高亮点为球心) |
输入
| 输入 | 类型 | 说明 |
|---|---|---|
| 输入图像 | 图像 | 输入图像 |
| 区域1 | / | 输入区域,用于拟合球1 |
| 区域2 | / | 输入区域,用于拟合球2 |
参数说明
离群点比例
范围[0,1],用于控制拟合时可容忍的离群点占比。数值越大,拟合对噪声/污染越不敏感,但极端设定会牺牲精度。
伪随机
- 不勾选:完全随机采样,结果在极小范围内可能有波动。
- 勾选:使用等价固定随机种子的伪随机序列,同一数据多次拟合结果一致,便于比对。
球形状探测误差
- 不勾选:只需测量两球心距离、半径或配合位置,速度更快。
- 勾选: 计算所有拟合点到拟合球心的距离值,再将距离值与拟合球的半径做差,滤除部分数据后,最大值减去最小值的差值即为球形状探测误差。
过滤比例(球形状探测误差勾选)
对球形状探测误差做排序后,在两端各截去过滤比例的一半再统计结果,抑制孤立毛刺/孔洞对结果的影响。默认:0.003(即总量的0.3%,双端各截0.15%)。 建议:0.001 ~ 0.01;过大可能掩盖真实问题,过小对离群点更敏感。
输出
| 输出 | 类型 | 默认启用 | 额外启用条件 | 说明 |
|---|---|---|---|---|
| 距离 | 实数 | 是 | / | 两球心之间的空间距离 |
| 球中心1 | 3D点 | 是 | / | 第一只球拟合得到的球心坐标 |
| 半径1 | 实数 | 是 | / | 球1的拟合半径 |
| 均方根1 | 实数 | 是 | / | 球1拟合误差的均方根误差 |
| 球形状探测误差1 | 实数 | 否 | 球形状探测误差勾选 | 球1的球形状探测误差 |
| 球中心2 | 3D点 | 是 | / | 第二只球拟合得到的球心坐标 |
| 半径2 | 实数 | 是 | / | 球2的拟合半径 |
| 均方根2 | 实数 | 是 | / | 球2拟合误差的均方根误差 |
| 球形状探测误差2 | 实数 | 否 | 球形状探测误差勾选 | 球2的球形状探测误差 |