球杆测量
功能介绍
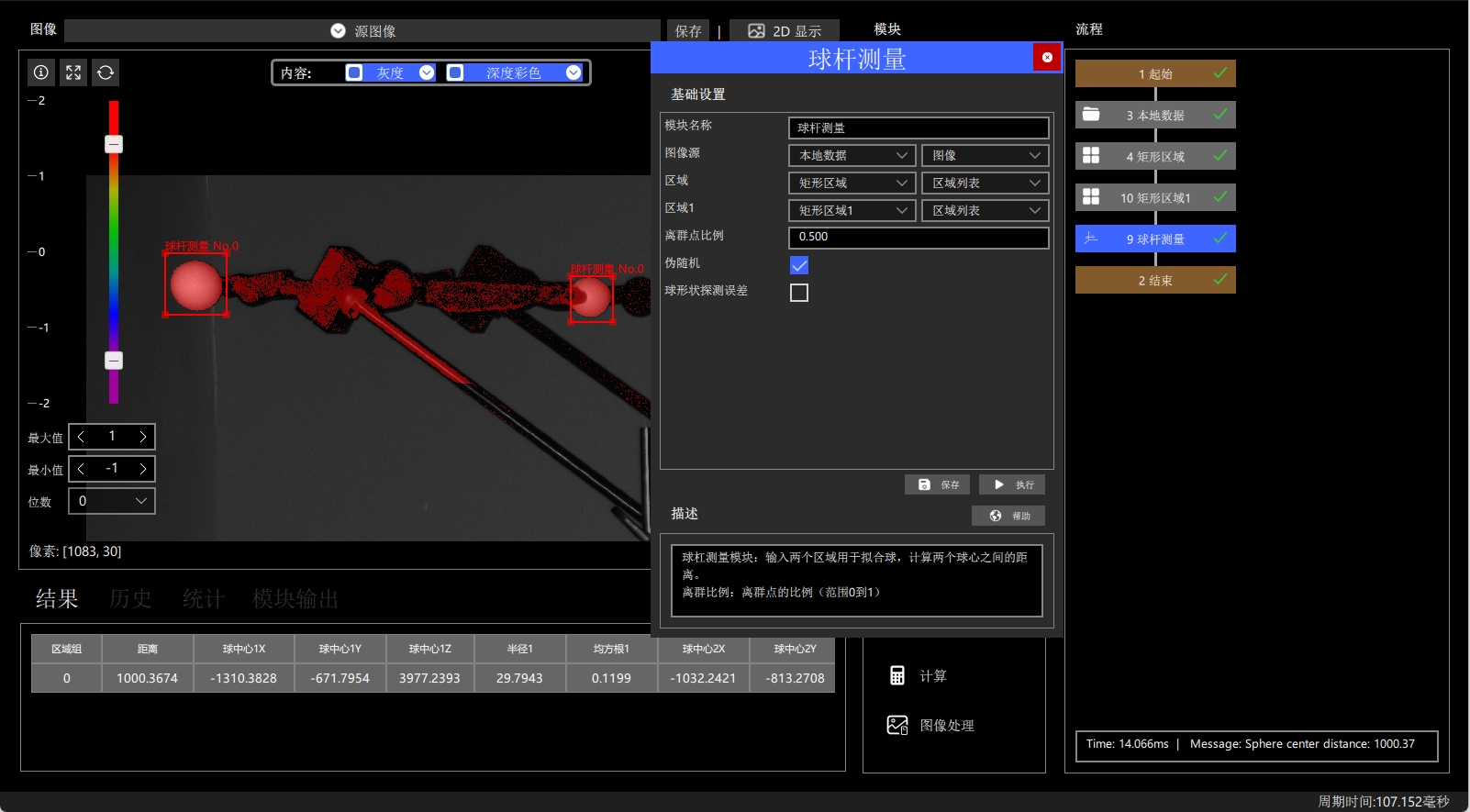
根据3D点集使用随机采样一致性拟合球,拟合出两个球计算球心距离即为球杆测量。
拟合球后可同时计算球形状探测误差,计算所有参与拟合点到拟合球心的距离,将距离值再与拟合球的半径做差,滤除部分数据后,将最大值减取最小值的差值即为球形状探测误差。
模块位置:测量-球杆测量
使用说明
参数说明
- 图像源:输入图像
- 区域:输入区域,用于拟合球1
- 区域1:输入区域2,用于拟合球2
- 离群点比例:范围[0,1],用于控制在进行球拟合时对离群点的处理程度
- 伪随机:随机种子,当开启后随机种子为0,即同样数据拟合出来的球结果相同
- 球形状探测误差:是否开启球形状探测误差计算
- 过滤比例:计算形状探测误差时滤除部分数据比例
案例流程

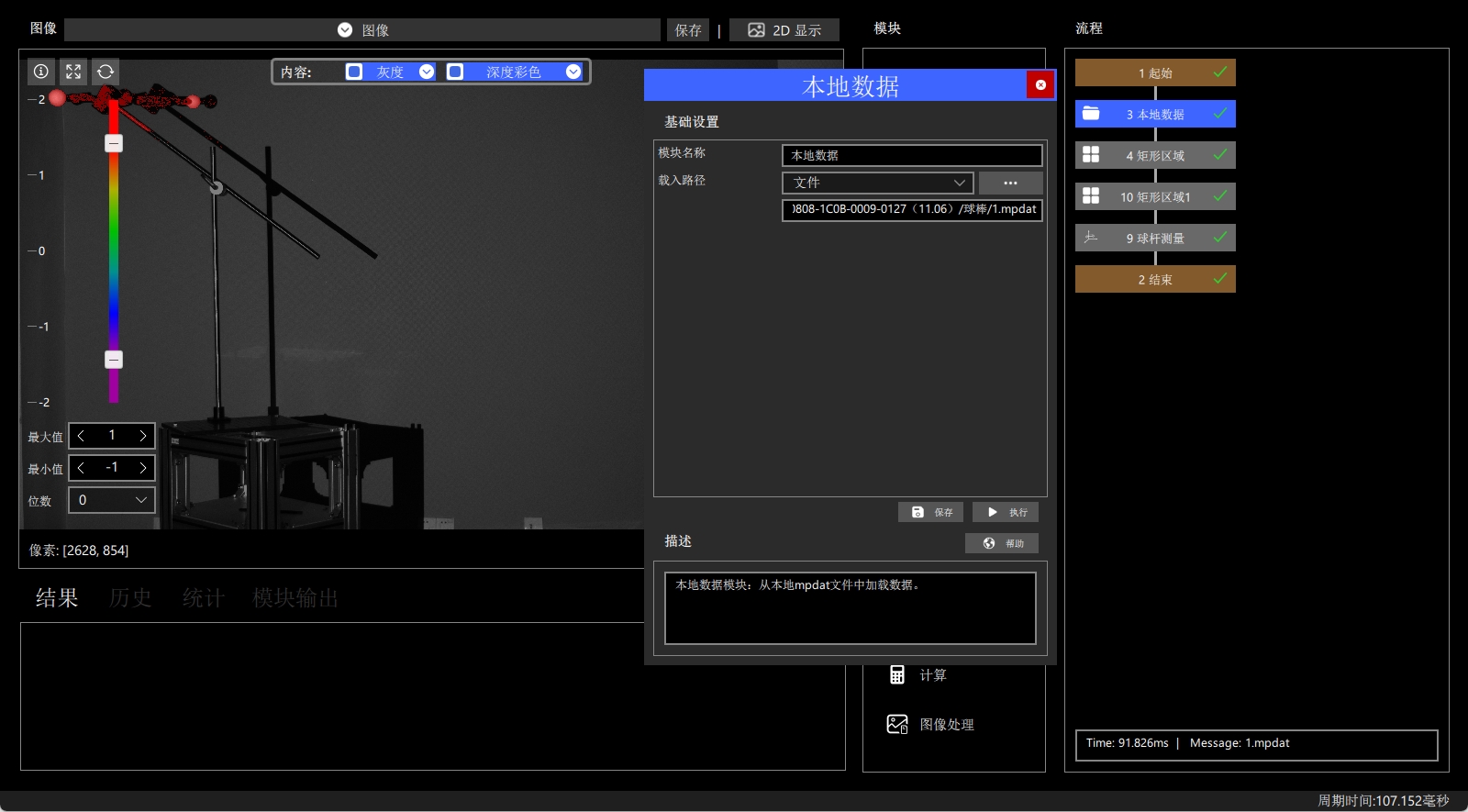
- 获取源数据,可以选择相机或者加载本地数据
- 使用矩形区域模块来选择需要拟合球1区域(也可以选择其他类型的区域,例如旋转矩形区域等)
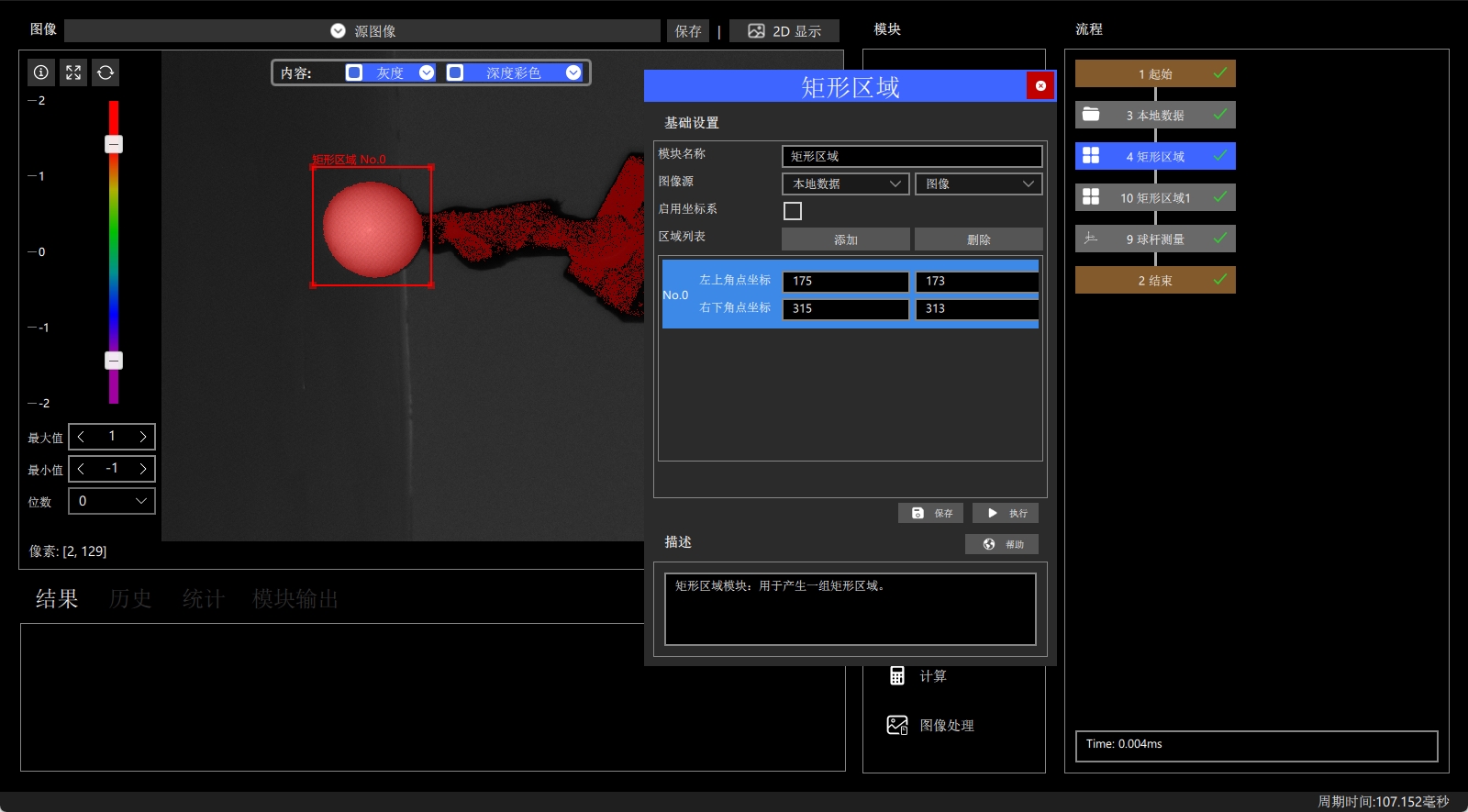
- 使用矩形区域模块来选择需要拟合球2区域(也可以选择其他类型的区域,例如旋转矩形区域等)

- 由选定的两个区域进行球杆测量
信息
上面的流程仅作为参考,实际根据不同应用场景的需求进行修改