简介
MegaVision是盛相科技(MEGA PHASE)打造的一款简单易用的,扩展性强,跨平台的的测量软件。
软件特点
多相机兼容
- 可连接SizectorS/M和Hdc相机;
- 支持多相机同时控制;
多种支持
- 支持输出IO,TCP,数据库等;支持字符解析和字符格式化;
- 支持通信事件;支持变量设置;支持json文本解析;
- 支持通过模板匹配、特征以及手动设定的2D坐标系的建立,用于区域设置;
- 支持多种区域,如矩形、圆形、旋转矩形、环形、多边形(开发中)等; 支持路径化、阵列化区域;
2D、3D、横截面
- 3D/2D图像显示;
- 高效的2D,3D和横截面预处理:高斯滤波、均值滤波、中值滤波、边缘检测、反色,二值化、镜像、旋转、几何变换、去飞点、修补、平滑、锐化、3D变换等;
- 精确度高的2D,3D和横截面测量算子:点、直线、平面、圆、球、点点测量、点线测量、线线测量、面面测量、高度测量、体积测量、粗糙度测量、球杆测量、Blob、相机映射、目标检测、矩阵运算、数值运算等;
灵活性和插件化
- 用户可以开��发自己的插件,扩充软件功能;
- 流程图形式控制运行逻辑,可以使用条件分支,循环等控制逻辑;
获取和运行
执行lemonApp.exe,程序获取目录:
\\Mpshnas\02_03_研发_软件\01_软件发布\09_lemon\
当前仅开放部分部门和人员可以访问,以后陆续开放,详情联系软件组。
环境要求
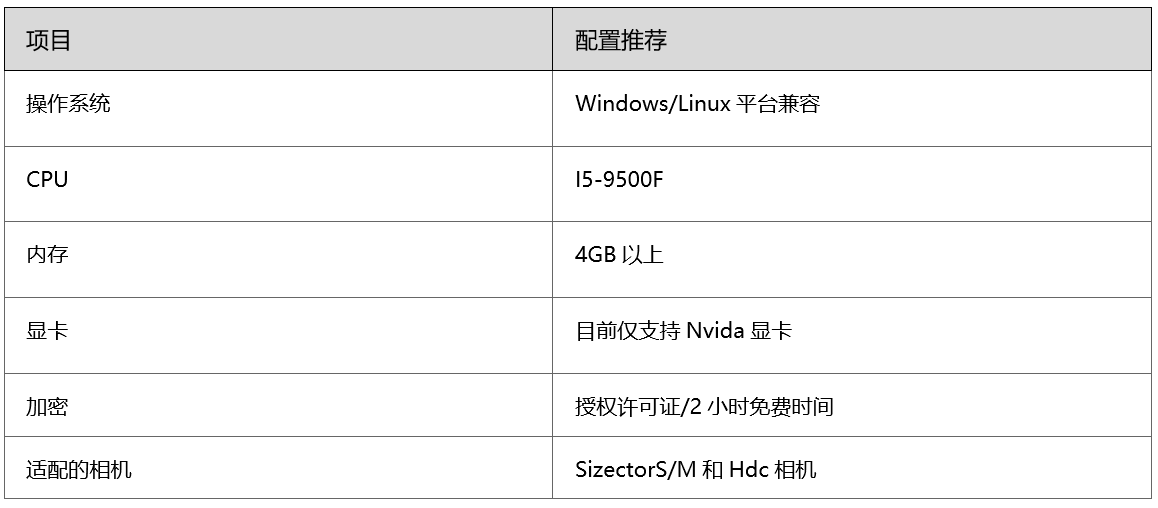
所有模块
所有模块按功能分组
相机:支持相机拍摄、调试。可添加数据导入和导出等;
Szector S、SizectorS图像源、Genl相机(Bate)、混合相机、混合相机图像源、相机调试数据导出
数据:本地数据、通道选择、数据保存、轮廓创建、截线轮廓、截面轮廓、截面轮廓(点云)、点云创建
区域:支持多种区域
矩形区域、圆形区域、旋转矩形区域、环形区域、阵列区域、直线阵列区域、弧形阵列区域、路径区域、克隆区域、旋转立方体区域
几何:2D点、卡尺2D、查找直线2D、拟合直线2D、拟合圆2D、2D点(轮廓)、查找直线2D(轮廓)、查找圆(轮廓)、轮廓边界框、3D点、多平面交点、3D直线、拟合直线3D、拟合圆3D、平面、平面(点云)、球、拟合圆柱、点云包围盒
定位:坐标系、坐标系3D、Bolb2D,模板匹配,相机映射2D,相机映射3D、轮廓匹配、点云匹配、探测触碰
标定:手眼标定计算
测量: 点点测量2D、点线测量2D、线线测量2D、图像信噪比、灰度测量、轮廓面积、点点测量3D、点线测量3D、线面测量3D、面面测量3D、高度测量、体积测量、粗糙度测量、球杆测量、厚度测量、有效点百分比测量、碰撞测量(点云)
计算:设置全局变量、静态列表、动态列表、动态列表操作、矩阵、位姿、数值运算、列表运算、矩阵运算、变换矩阵计算、结果判定、脚本、字符串运算(Bate)
图像处理:感兴趣区域(2D)、均值化2D、二值化2D、高动态范围2D、轮廓掩膜、滤波2D、形态学2D、几何变换2D、畸变矫正2D、轮廓变换、轮廓滤波、感兴趣区域3D、去除飞点、填补、平滑、中值滤波、3D变换、深度图、范围限制、拼接图像、平面误差补偿、去畸变、滤波(点云)、聚类提取、合并图像2D、合并轮廓、合并点云
检测:目标检测、标定板识别
流程控制:组合模块、集合、条件分支、并行分支、循环模块、Gpu流、Gpu上传、Gpu下载
输入输出:接收数据、发送数据、格式化字符、表格、图形标注、等待事件、发送事件、文件解析、数据库、SicectorS输出、时间获取
基于1.12.10.0版本。
更多信息,请见“模块概览”