手眼标定
功能介绍
手眼标定的核心是建立相机坐标系与机器人坐标系之间的转换关系。两者建立联系后,机器人可以通过相机提供的视觉信息完成对物体作业。
手眼标定前准备工作
安装/放置相机标定板
1.安装好相机和机器人,检查确定机器人工作范围内无妨碍物。
2.准备好一张标定板, 放置在一个平整的工作面上, 保证摄像头可以清晰地看到这个标定板。
手眼标定使用说明
1.模式选择
根据相机和机械手的安装位置,手眼标定分为两种配置:
眼在手上(Eye-in-Hand):相机安装在机器人末端执行器上,随机械臂一起运动。这种方式适用于机器人需要实时调整相机视角的场景,如抓取不规则物体或进行精细装配。
眼在手外(Eye-to-Hand):相机固定在机器人外部,如工作台上方或侧面,用于监控整个工作区域,适用于流水线上的物体分拣和视觉检测。
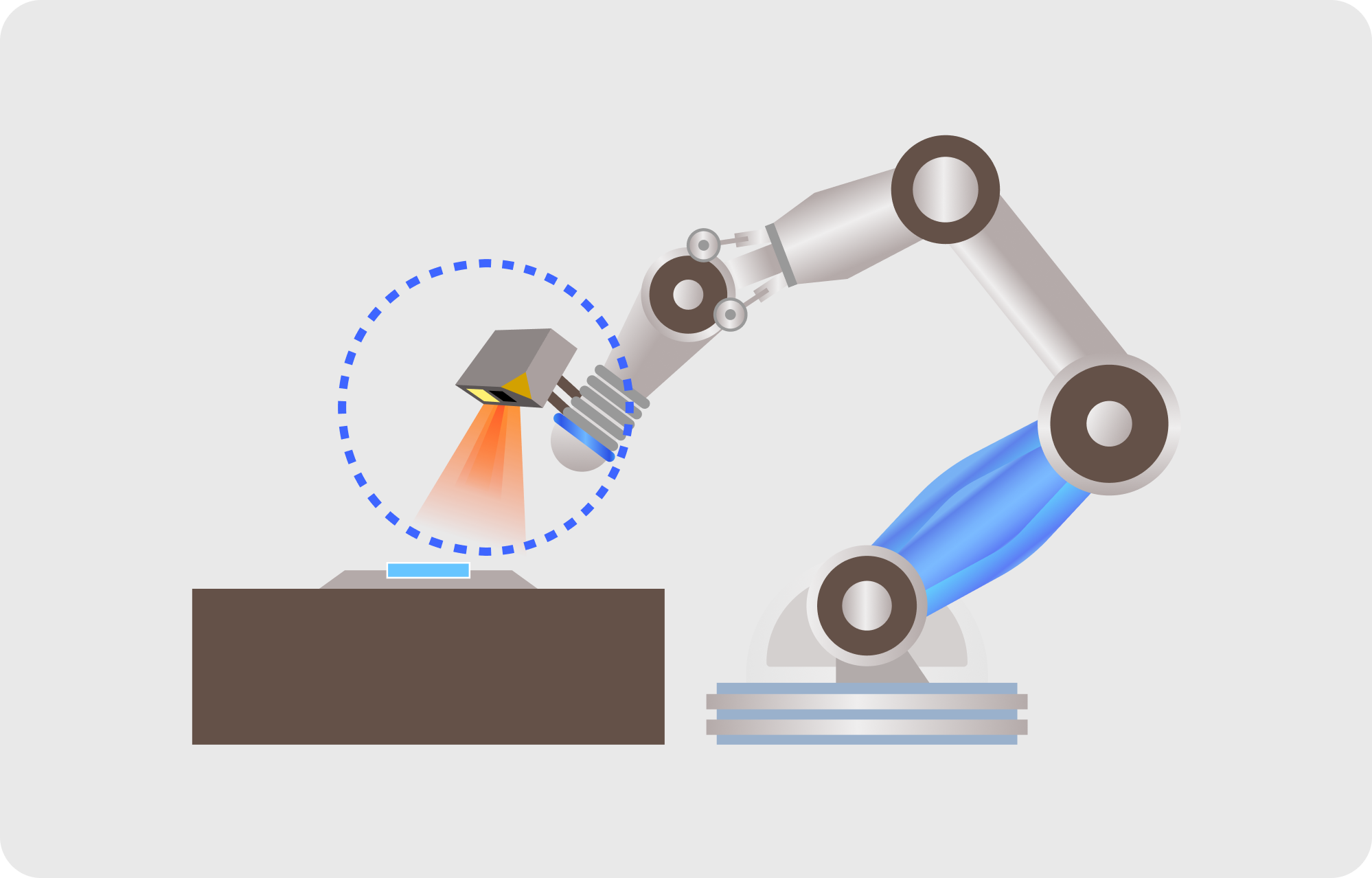 | 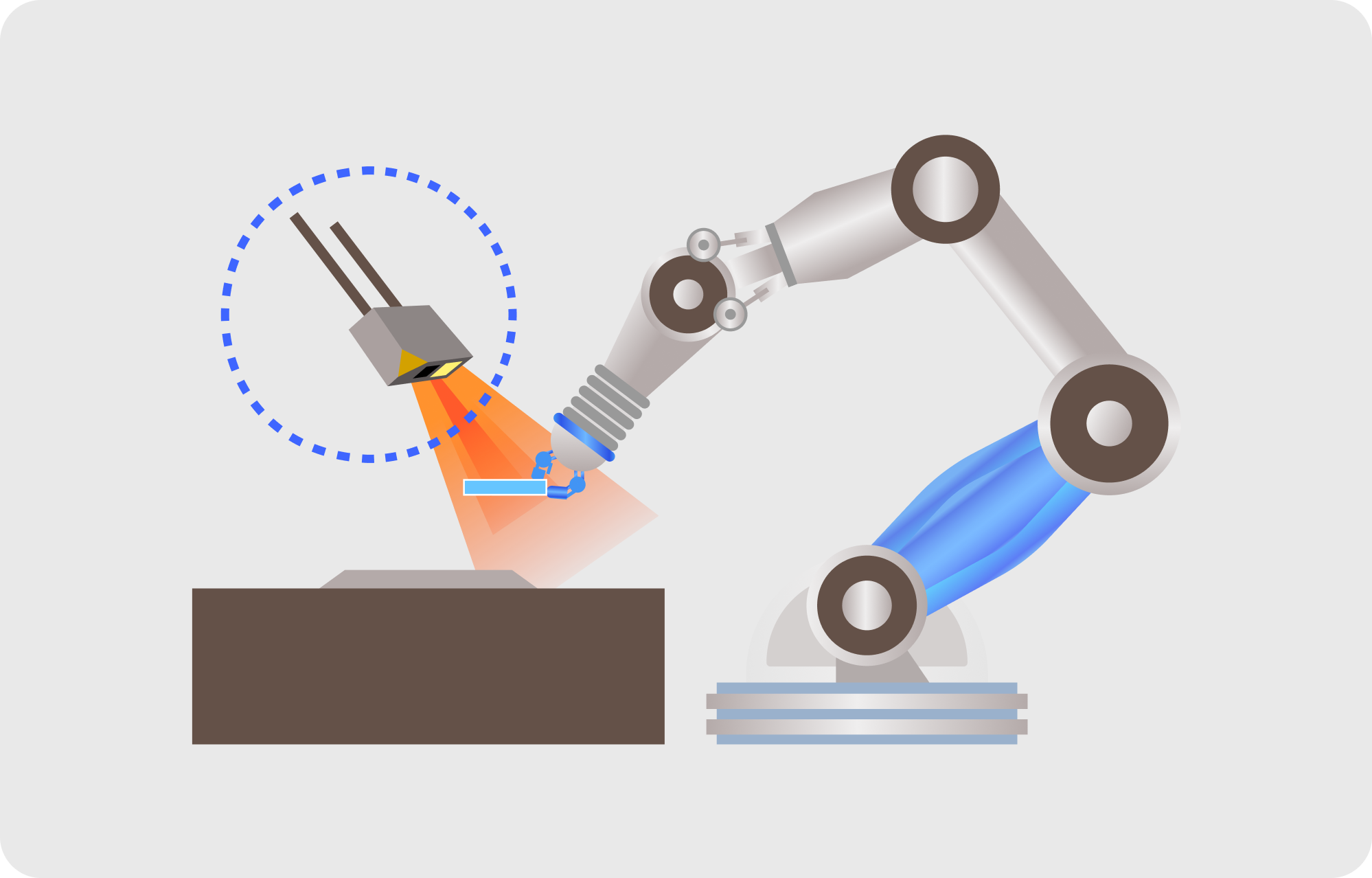 |
|---|---|
| 眼在手上 | 眼在手外 |
2.设置标定板
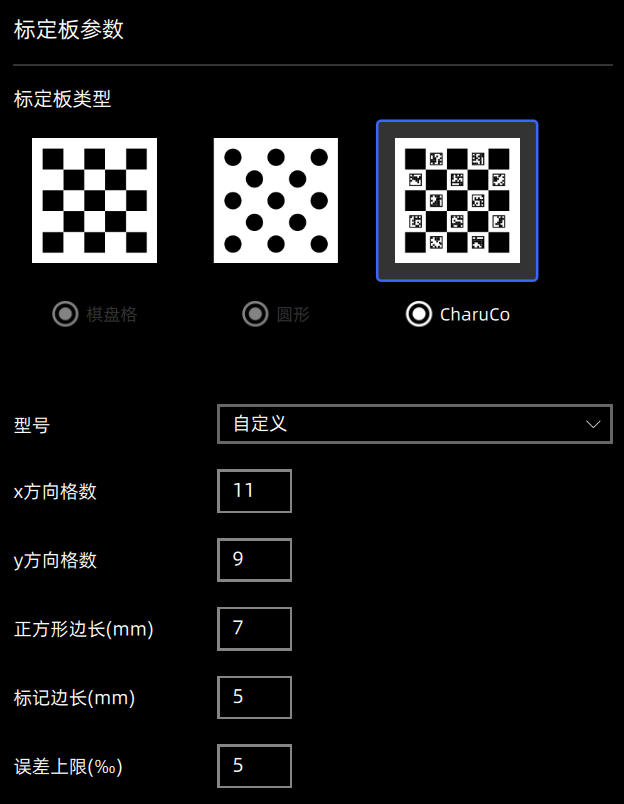
标定板参数
根据标定板实物在界面中选择标定板类型,设置该标定板相关参数
例:CharuCo标定板
3.连接相机
①:在设备列表中选择相机连接,根据右侧实时相机画面调节相机参数
②:通过调参让标定板画面清晰完整后,点击识别标定板,自动设别成功后出现检测结果:通过可以进行下一步
4.连接机器人
操作模式
①:手动添加手动调节机器人和标定板的坐标来捕获图像,为确保计算结果的准确性至少添加6组有效数据来进行分析处理。
②:自动添加设置连接机器人的参数,通过预设的脚本数据让机器人进行自动标定.开始标定前要保证机器人工作环境安全。
5.标定计算
标定结果显示标定数据总数,并提示提示问题数据。
手眼标定矩阵:3*4的矩阵,表明了相机坐标系相对于机器人坐标系的旋转和平移关系。
标定误差:是指在手眼标定过程中,由于各种因素导致的标定结果与实际值之间的偏差。所有数据点误差的平均值或最大值,用于评估整个标定过程的精度。标定误差越小,表示标定结果越精确。
误差过大时可以��尝试
- 添加标定数据,以提高标定的准确性
- 调整平移量,以减小误差
- 确保标定板的平整度和精度
- 减少环境光对图像的影响,使用恒定光
标定结果
序号:标定数据的顺序
机器人坐标:X、Y、Z、RX、RY、RZ
标定板坐标:X、Y、Z、RX、RY、RZ
误差值:正常误差值为白色,有问题误差值为红色
图像:每组标定数据对应一张图像,点击图像可以放大查看。
操作:使能控制该数据参不参加标定计算、编辑单组数据中机器人坐标和标定板坐标
删除:删除选中数据
添加数据
点击添加后弹出窗口,手动调节机器人和标定板后点击获取数据。通过以上操作获取单组数据,确认数据后点击确认提交即可添加一组数据到标定结果列表中。
导出
导出标定结果表格。