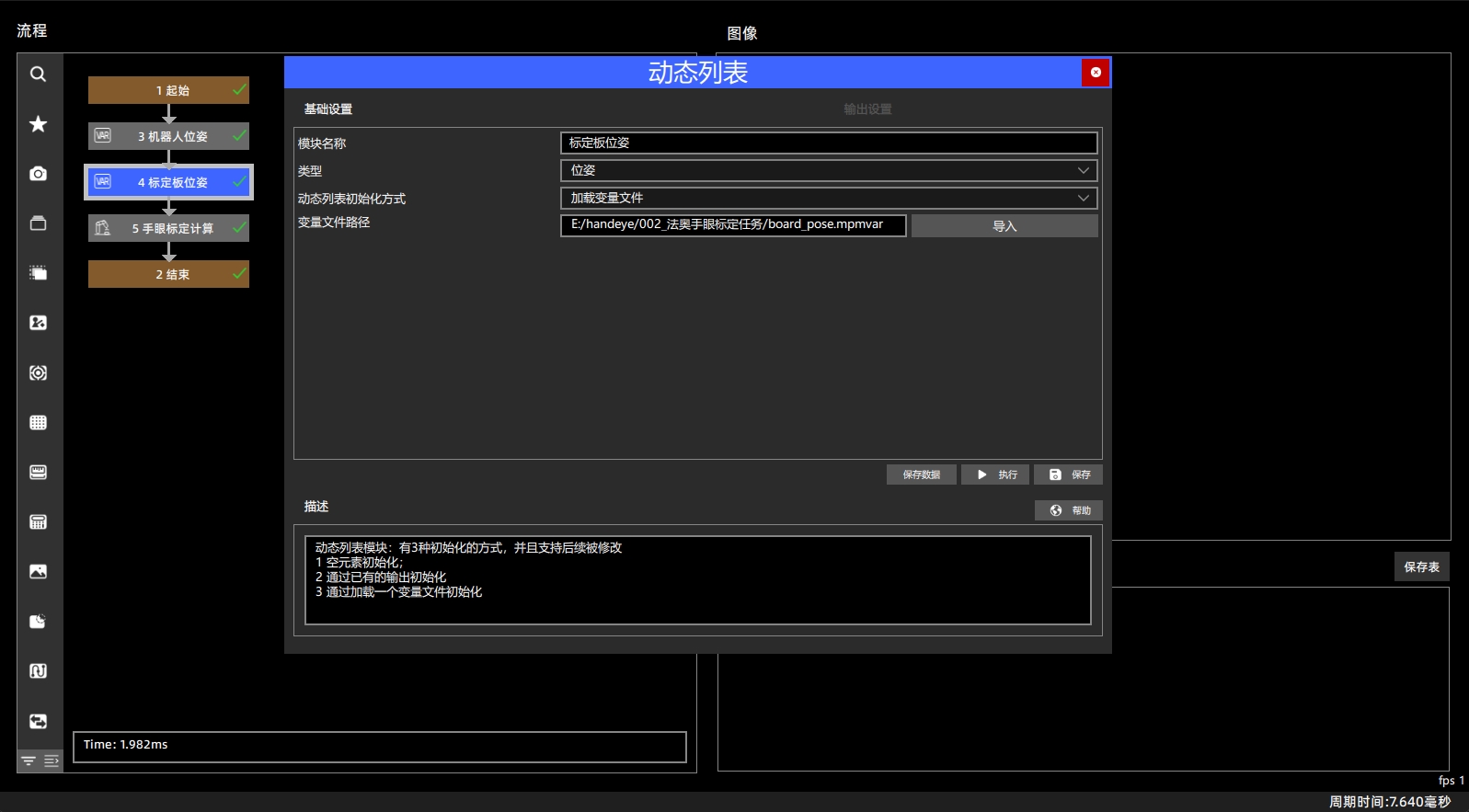
标定手眼标定计算版本:Next本页总览手眼标定计算 功能介绍 模块位置:标定-手眼标定计算 本模块通过匹配机器人位姿与标定板位姿的对应关系,计算出一个4×4的旋转平移变换矩阵(即手眼矩阵),用于建立机器人坐标系与视觉坐标系之间的转换关系。 输入 输入类型说明机器人位姿列表位姿集机器人的位姿(一般从机器人端获得)标定板位姿列表位姿集标定板的位姿(可从检测-标定板识别模块获得) 案例流程 添加两个动态列表模块,分别从读取本地的机器人位姿和标定板位姿 配置好参数后即可计算手眼标定矩阵 信息上面的流程仅作为参考,实际根据不同应用场景的需求进行修改